For BOE Shield-Bot navigation, we need to control both servos at once.
- Enter, save, and upload ServosOppositeDirections to the Arduino.
- Verify that the servo connected to pin 13 turns counterclockwise and the one connected to pin 12 turns clockwise.
Example Sketch: ServosOppositeDirections
/*
Robotics with the BOE Shield – ServosOppositeDirections
Generate a servo full speed counterclockwise signal with pin 13 and
full speed clockwise signal with pin 12.
*/
#include <Servo.h> // Include servo library
Servo servoLeft; // Declare left servo signal
Servo servoRight; // Declare right servo signal
void setup() // Built in initialization block
{
servoLeft.attach(13); // Attach left signal to pin 13
servoRight.attach(12); // Attach right signal to pin 12
servoLeft.writeMicroseconds(1700); // 1.7 ms -> counterclockwise
servoRight.writeMicroseconds(1300); // 1.3 ms -> clockwise
}
void loop() // Main loop auto-repeats
{ // Empty, nothing needs repeating
}
This opposite-direction control will be important soon. Think about it: when the servos are mounted on either side of a chassis, one will have to rotate clockwise while the other rotates counterclockwise to make the BOE Shield-Bot roll in a straight line. Does that seem odd? If you can’t picture it, try this:
- Hold your servos together back-to-back while the sketch is running.
Pulse Width Modulation
Adjusting the property of a signal to carry information is called modulation. We’ve discovered that servo control signals are a series of high pulses separated by low resting states. How long the high pulse lasts—how wide the high pulse looks in a timing diagram—determines the speed and direction that the servo turns. That adjustable pulse width carries the servo setting information. Therefore, we can say that servos are controlled with pulse width modulation.
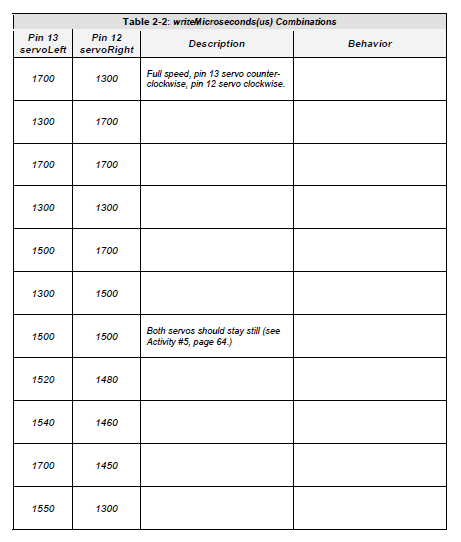
Different combinations of writeMicroseconds us parameters will be used repeatedly for programming your BOE Shield-Bot’s motion. By testing several possible combinations and filling in the Description column of Table 2‑2, you will become familiar with them and build a reference for yourself. You’ll fill in the Behavior column later on, when you see how the combinations make your assembled BOE Shield-Bot move.
- Save a copy of the ServosOppositeDirections sketch as TestServosTable2_2.
- Test each combination of values in servoLeft.WriteMicroseconds(us) and servoRight.writeMicroseconds(us) and record your results in Table 2‑2—a PDF of this table is included with this chapter's code download zip archive.