
While it is possible to fly your ELEV-8 v3 after you've completed the ELEV-8 v3 Assembly Guide [1] and UAV Safety, Laws, and Good Citizenship [2] tutorials, taking the time to calibrate and tune your ELEV-8 v3 will improve flight performance and extend the life of your quadcopter.
Here you will find instrustions for gyroscope and accelerometer calibration, basic roll, pitch, thrust, and gain tuning, and mechanically balancing your frame and propellers.
In these tutorials, you will use the Parallax Ground Station software, which provides a set of tools and adjustments that will help you optimize your ELEV-8 v3's flight performance. It is also possible to do further tuning by adjusting parameters in the ELEV-8 v3's firmware.
In this tutorial, it is a good idea to perform the tuning activities in the best-bang-for-your-buck order they are presented. But, since they are all optional, you may stop at any point.
The Flight Controller firmware comes with a set of default constants for the gyroscope sensor to use. By following this procedure, you will gently warm your ELEV-8 Flight Controller (or simply let it sit for a while). When completed, the GroundStation software uploads constants to the Flight Controller's EEPROM. Then, the firmware will use these constants, specific to your very own ELEV-8 Flight Controller, instead of the defaults while flying. This will improve overall flight performance.
Reloading the ELEV-8 Flight Controller firmware will not over-write the calibration settings you create with this procedure. To completely erase these (caution - and all!) calibration settings, see the Factory Default option under the System Setup tab.
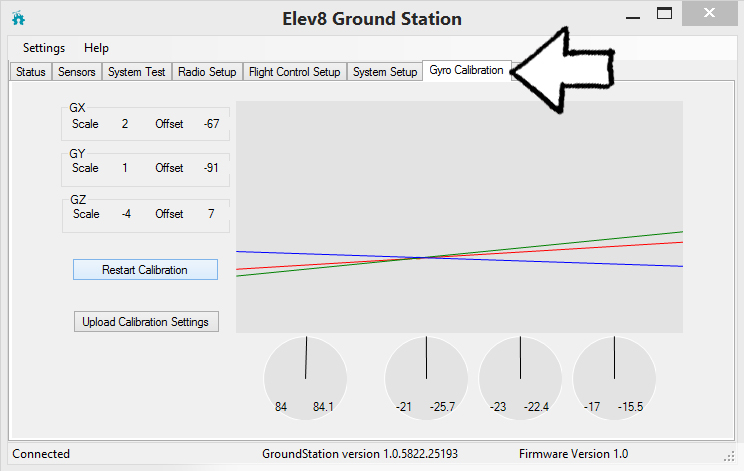
To properly calibrate the ELEV-8 Flight Controller gyroscope, you will need a hair dryer or other source of gentle warm air. If you do not have access to a hair dryer, you can simply leave the ELEV-8 v3 still for a long period of time (5-15 minutes).
It is important for the ELEV-8 to remain absolutely still during calibration - slamming doors or someone walking around and shaking the floor can create enough vibration to throw off the calibration.
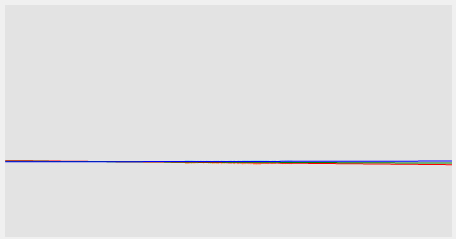
The gyro readings should plot a line and the offset and scale values will mostly stabilize. If you do not have a hair dryer or heat gun, leave the ELEV-8 v3 still for a long period of time to stabilize the gyro readings. When they are stable, the graph will look similar to this:
The ELEV-8 Flight Controller will beep to let you know the settings have been saved.
The Flight Controller firmware comes with a set of default constants for the accelerometer to use. By following this procedure, you will move your ELEV-8 v3 in a series of positions as prompted by the Ground Station software. When completed, the GroundStation software uploads constants to the Flight Controller's EEPROM. Then, the firmware will use these constants, specific to your very own ELEV-8 Flight Controller, instead of the defaults while flying. This will improve overall flight performance.
Reloading the ELEV-8 Flight Controller firmware will not over-write the calibration settings you create with this procedure. To completely erase these (caution - and all!) calibration settings, see the Factory Default option under the System Setup tab.
In the Ground Station software, click on the “Accel Calibration” Tab. You should see this screen:

It is important for the ELEV-8 to remain absolutely still during calibration - slamming doors or someone walking around and shaking the floor can create enough vibration to throw off the calibration.
You will be taking 4 readings, rotating the ELEV-8 v3 one-quarter turn (90º) between each reading:

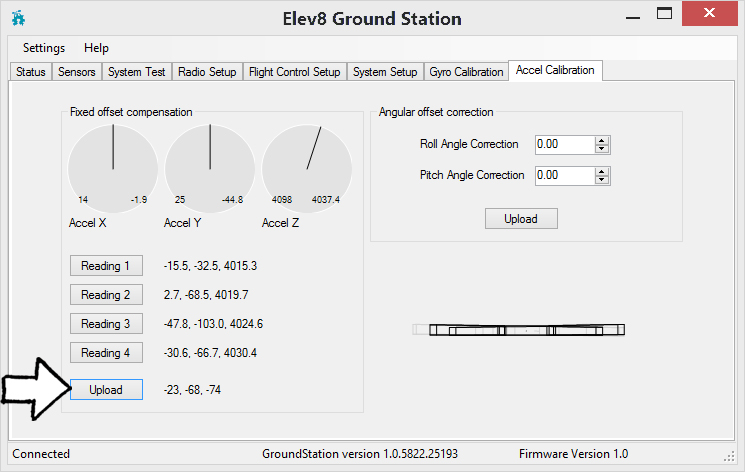
The ELEV-8 Flight Controller will beep to confirm that the accelerometer has been calibrated.
A basic way to optimize the performance of a multirotor, including an ELEV-8 Quadcopter, is to balance the frame, ensuring that its center of mass of the multirotor is in the exact geometric center. This will balance the workload of the motors, allowing you to get maximum power and performance out of your multirotor.
PRO TIP: Do this activity before doing any roll and pitch correction.
First, balance the frame without any batteries. Then, place the battery in a position that you think will maintain the balance, and repeat the procedure to check it again.
![]()
You will likely see it tilt until one of the other booms rests on the table surface. The goal is to get it to balance, so no booms are touching the table surface.

The same procedure applies to hexcopters and octo-copters; repeat the process across each opposing set of booms.
Once you have flown your ELEV-8 v3, you may have observed a drift. If you fly your ELEV-8 in very still air (no wind) and it consistently drifts to one side or forward/back (or combination of the two), you can correct the drift using the Parallax GroundStation software and achieve a very stable hover. This process does require trial-and-error and must only be done in very still air (no wind).
Do not follow this procedure unless you have:
- Properly calibrated both the accelerometer and gyroscope,
- Flown in very still air (no wind),
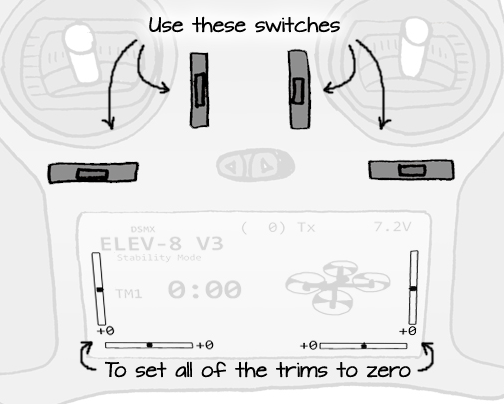
- The trims on your transmitter are all set to zero, AND
- Observed a consistant amount of drift in a consistant direction.
If your trims are not set to zero, be sure to set them to zero before proceeding:
It is important to determine how much drift, and in what direction, ELEV-8 v3 is drifting.
![]()
If it is drifting to the left or right, it can be corrected with a Roll Angle Correction. If it is drifting forward or backward, it can be corrected with Pitch Angle Correction. If it is drifting at an angle, it will require both Roll and Pitch Correction. The corrections can be positive or negative:

The Flight Controller firmware comes with a set of default constants for the arming and disarming delays, throttle values and ranges, and battery monitoring and alarms. These can all be adjusted in the "System Setup" tab. When completed, the GroundStation software uploads these constants to the Flight Controller's EEPROM. Then, the firmware will use these constants, specific to your very own ELEV-8 Flight Controller, instead of the defaults.
Reloading the ELEV-8 Flight Controller firmware will not over-write the system settings you create with this procedure. To completely erase these (caution - and all!) calibration settings, see the Factory Default option under the System Setup tab.

These values determine the throttle output values that are sent to the ESCs. All motor output values are in microseconds.
If you are an individual hobby flyer, you may not have a reason to change some of these settings. If you are preparing quadcopters for use in a group or class environment, some of these settings may help facilitate the management of your class.
Clicking Factory Default Prefs will erase ALL calibrations and custom settings including those made under other tabs, and restore factory defaults. If you accidentally make changes that do not work, you can use the Factory Default Prefs button to restore the original settings. But remember, you will need to re-do any calibration procedures as well as all of your settings.
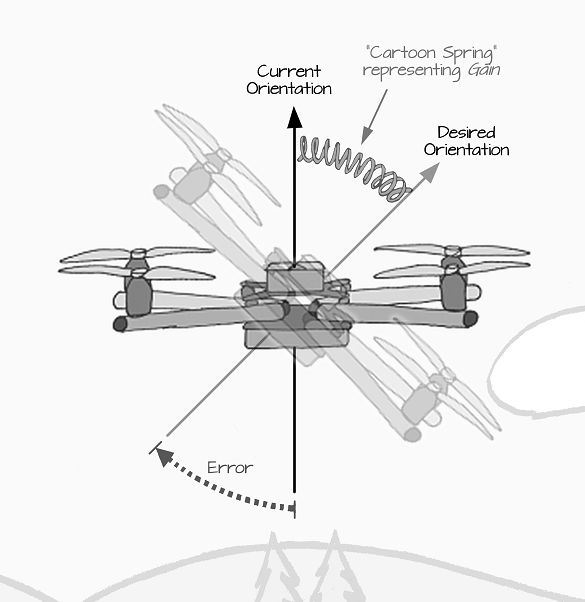
Once you have flown your ELEV-8 v3 for a few hours and have a good feel for how it responds, you may want to adjust the gains for each of its flight controls. Adjusting the gains of your ELEV-8 v3 can make it more responsive for experienced operators or soften the controls for gentler, smoother performace. It is possible to over- or under- adjust the gain, causing flight that is too sluggish or even an unwanted oscillation.
To understand how control gain works, let's use an analogy. First, it is helpful to understand there are two “orientations” that the ELEV-8 v3 is continually updating within the Flight Controller: its current orientation and the operator’s desired orientation. For instance, if the ELEV-8 v3 is hovering, and the operator pushes the right stick to the right, the new desired orientation is a clockwise roll to the right:
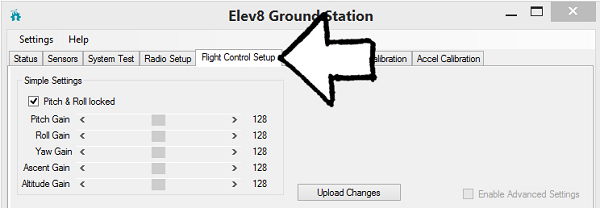
The Flight Controller firmware comes with a set of default constants for the five different gain adjustments available: Yaw, Pitch, Roll, Ascent (Throttle), and Altitude. With this procedure, the GroundStation software uploads constants to the Flight Controller's EEPROM. Then, the firmware will use these constants, specific to your very own ELEV-8 Flight Controller, instead of the defaults while flying. This will improve overall flight performance.
Reloading the ELEV-8 Flight Controller firmware will not over-write the calibration settings you create with this procedure. To completely erase these (caution - and all!) calibration settings, see the Factory Default option under the System Setup tab.
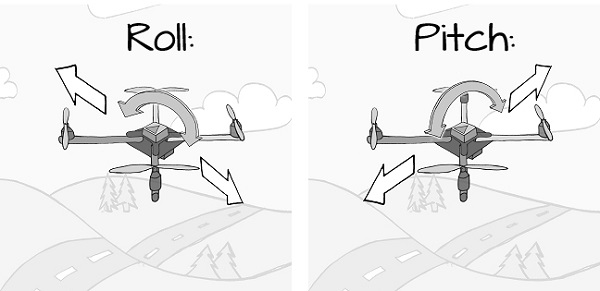
Determining the best values to use for the Roll Gain and Pitch Gain is often a matter of preference, and it will likely take some trial-and-error over multiple flights to determine the best values for your ELEV-8 v3 or multirotor.
One way to help determine whether a value is pereferable is to set Roll to an untested value and Pitch to a known good value, and compare them in flight using the left/right and forward/back of your transmitter's right stick.
Once you've decided what gain value works best, It is recommended that you keep the Roll Gain and Pitch Gain values the same for the ELEV-8 v3 because it has an "X" configuration (its 4 motors are all the same distance from each other). If your multirotor is physically different (for instance, long and narrow), it may require different settings for Roll and Pitch.
To set the Roll Gain and Pitch Gain:
Yaw Gain (default is 128) - The Yaw Gain slider sets the amount of gain on the control system that helps your ELEV-8 v3 or multirotor rotate in place:

Altitude and Ascent Gain apply only to Alititude-Hold mode which is NOT currently enabled at this time (ELEV-8 Flight Controller firmware 1.0.2).
(Planned) In Alititude-Hold mode, there are two states: 1) Holding 2) Ascending/Descending. With the throttle stick above or below center, an ascent rate is computed and the Ascent Gain controls how much to adjust the throttle to try to keep the ELEV-8 v3 or multirotor at the computed ascent/descent rate. When the throttle is centered, the flight controller determines the current altitude and uses the Altitude Gain to control how much ascent/descent is required to hold that altitude. The calulated ascent/descent rate is then fed into the ascent rate control that uses the Ascent Gain.
There are several advanced settings within the Radio Setup tab of the Parallax GroundStation that can be used to tune the flight characteristics of your ELEV-8 v3 quadcopter. These settings are specific to the mode your ELEV-8 v3 is in, so it is important to understand what each setting is and how it works.

On the bottom half of the GroundStation window, you will see six different adjustments that can be made:
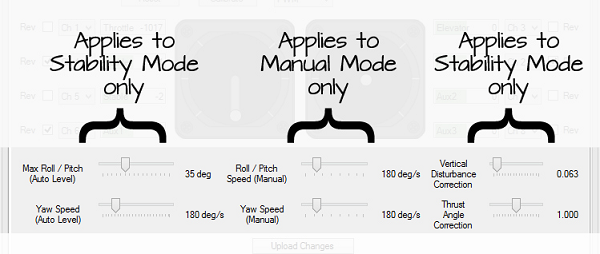
Stability Mode limits how far the ELEV-8 v3 or multirotor will Roll or Pitch in flight. The default limit is 30 in any direction.
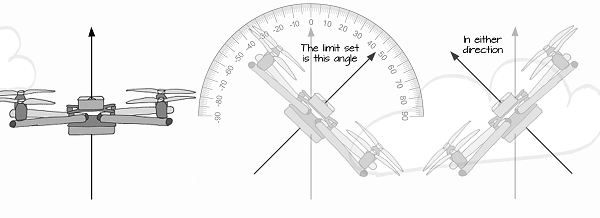
To change the Maximum Roll/Pitch:
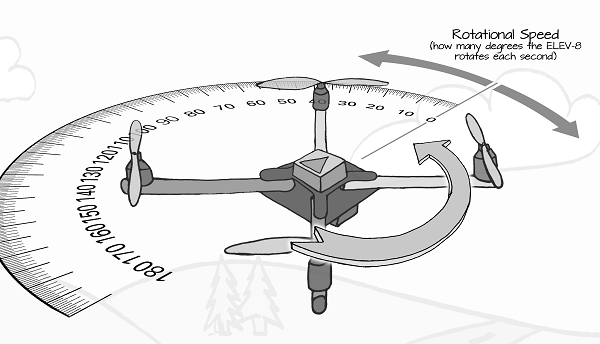
To change the Yaw Speed settings:
To change the Roll/Pitch Speed:
To change the Vertical Disturbance Correction:
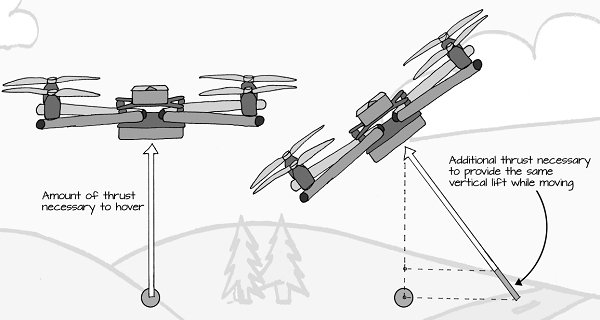
To change the Thrust Angle Correction:
Although it is not necessary to balance the propellers that come with the ELEV-8 v3 Quadcopter, taking the time to balance them will improve the flight performance and flight time, reduce vibration, and increase the lifespan of your ELEV-8 v3.
Horizon Hobby has published a YouTube video that demonstrates the process of balancing propellers for hobby aircraft here: How To - Prop Balancing [5]
To balance the propellers, you will need:
To balance each propeller:
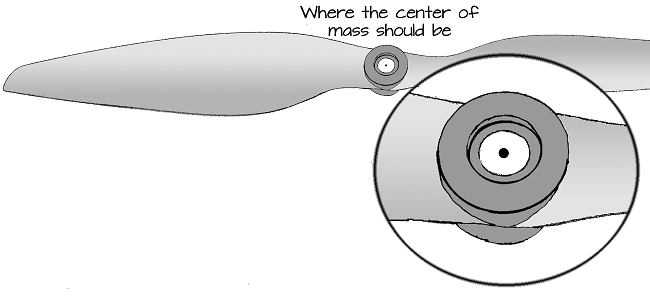
The propeller's center of mass should be in the very center of the propeller's hub. You can imagine it as a small dot. When you place the propeller in the propeller balancing tool, how it turns and settles helps you determine if the center of mass is not centered on the propeller, and if it is only slightly or very off-center.

If one of the propeller's blades is heavier than the other:

If the propeller consistently falls and settles with the same side up every time, one side of the hub is heavier than the other. To balance the hub:

Links
[1] http://learn.parallax.com/elev-8-v3-quadcopter-assembly-guide
[2] http://learn.parallax.com/uav-safety-laws-and-good-citizenship
[3] https://www.parallax.com/downloads/parallax-groundstation-software-windows
[4] http://learn.parallax.com/propeller-c-set-simpleide
[5] https://youtu.be/OXuNnYQO2s4