With just a few small tweaks to the JavaScript and PBASIC, that light control with checkboxes app can be transformed into slider control of servo position.
Keep in mind: If you followed the instructions in the Join Another Wi-Fi Network section, you’ll have to replace 192.168.4.1 with your IP address.
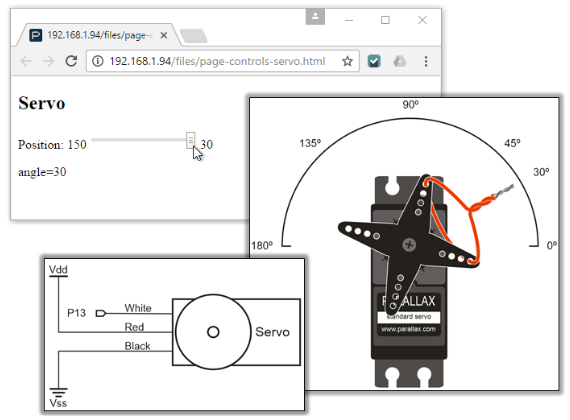
This is the HTML that displays the slider and the angle. When the slider is adjusted, the onchage=”servoPosition(id)” passes the id of the slider to the servoPosition function’s sliderID parameter.
<H2>Servo</H2>
Position: 150
<input type="range" id="position"
min="30" max="150" value="90"
onchange="servoPosition(id)">
30
The servoAngle var get’s the slider’s value with document.getElementById(sliderId).value. The slider actually counts from 30 to 150, so servoAngle = (150 - servoAngle) + 30 calculates what the angle we really want is. For example, when the slider is ⅓ of the way from left to right, the range type returns 70, but we really want that to be 110. With servoAngle = (150 - servoAngle) + 30 we get 110 = 150 - 70 + 30. After that, nameVal = “angle=” + servoAngle creates the name value pair parameter to send to the httpPost function. For example, with the slider set to ⅓ of the way from left to right, it might send “angle=110”. The PBASIC has a listener set up to monitor HTTP POST requests witht he “/servo” path, so the httpPost call is httpPost(“/servo”, nameVal).
function servoPosition(sliderId)
{
var servoAngle = document.getElementById(sliderId).value;
servoAngle = (150 - servoAngle) + 30;
var nameVal = "angle=" + servoAngle;
document.getElementById("servoval").innerHTML = nameVal;
httpPost("/servo", nameVal);
}
As with the previous messages and lights, the information about where the web page wants to position the servo will come through as HTTP POST requests, so the #DEFINE POSTS is set to 1. This incorporates the code below the “Wi-Fi support below” line that handles POST requests.
' Page Controls Servo Host Host.bs2
' Allows page-controls-servo.html to control servo position through
' a range (slider) control.
' {$STAMP BS2} ' Target = BASIC Stamp 2
' {$PBASIC 2.5} ' Language = PBASIC 2.5
' I/O connections & baud rate.
ToDI CON 2 ' BS2 P11 -> Wi-Fi DI
FromDO CON 4 ' BS2 P10 <- Wi-Fi DO
' Select which features to support.
#DEFINE POSTS = 1 ' HTTP POST requests
#DEFINE GETS = 0 ' HTTP GET requests
#DEFINE WEBSOCKETS = 0 ' WebSockets
#DEFINE PATHS = 0 ' Path text comparisons
#DEFINE DEBUGS = 0 ' Debug Terminal Info
The setup is also almost the same as the previous two examples, just a different name for the setup string DATA, the ID, and a different path -”/servo”.
' Wi-Fi setup and initialization
ListenSErvo DATA CMD, LISTEN, HTTP, ' String to set up listener ID
"/servo", CR
ServoKey DATA "angle", CR ' I/O message key search string
servoId VAR Nib
Restart_Point: ' Beginning of program
PAUSE 1000 ' Wait for certain OS COM ports
DEBUG "Starting...", CR ' Display starting message
GOSUB Break ' Break condition to Wi-Fi module
eeAddr = ListenServo ' Prepare Listener setup string
GOSUB Listen_Setup ' Set up listener
servoId = id ' Store ID that was returned
IF servoId > 0 THEN ' Check if listener setup success
DEBUG "servoIdId = ", DEC servoId, CR, CR
ELSE
DEBUG "Error setting up listener!"
END
ENDIF
The Main loop checks if there are any POST requests coming from with the “/servo” path, and if so, it puts the angle information in its servoAngle variable with SERIN FromDO, Baud, msTimeout, Warning,' Get post data prameters [WAIT(CMD, "="), DEC servoAngle]. Of course, this command comes between the required Post_Reqeust_Start and Post_Request_Stop function calls.
' Servo setup and initialization
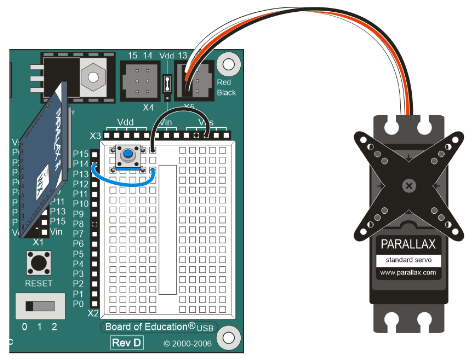
servoPin CON 13 ' Servo constant and variables
servoAngle VAR Word
servoPulse VAR Word
servoAngle = 45 ' Initialize servo angle
DO ' Main loop
GOSUB Poll_Events ' POLL for recent events
IF op = "P" AND id = servoId THEN ' If POST request pending
IF(id = servoID) THEN
eeAddr = ServoKey ' Set to filter for txt key
GOSUB Post_Request_Start ' Initialize POST request
SERIN FromDO, Baud, msTimeout, Warning,' Get post data parameters
[WAIT(CMD, "="), DEC servoAngle]
GOSUB Post_Request_Ack ' Acknowledge POST
DEBUG "servoAngle = ", ' Display LED values
DEC servoAngle, CR
ENDIF
ENDIF ' end op = 0 & id = ledId
servoPulse = 300 + (servoAngle * 5)
PULSOUT servoPin, servoPulse
LOOP
' ========[ Your code above ]===============================================
' ========[ Wi-Fi support below ]===========================================
The position the Parallax Standard Servo holds increases by 1 degree per 10 microseconds of pulse width increase with 1500 being about 90 degrees. Since PULSOUT units are in 2 microsecond units, the 0 to 180 range is PULSOUT pin, 300 to PULSOUT pin, 1200. Try substituting some values into servoPulse = 300 + (servoAngle * 5). For example, servoAngle = 0 should make servoPulse 300. Likewise, servoAngle = 180 should make servoPulse 1200, servoAngle = 90 yields 750, and so on... PULSOUT servoPin, servoPulse sends the corresponding control pulse to the servo connected to servoPin (13).
