Maze navigation is the heart of many robotic competitions, including the Micromouse maze and the Trinity firefighting competitions. It is considered by most to be the one of the most challenging competitions since it requires a fair amount of work and ingenuity. This project will introduce basic maze navigation logic by using the Boe-Bot Robot and the QTI Line Follower AppKit (#28108) to navigate through an electrical tape maze. This activity demonstrates how to easily program your Boe-Bot robot to navigate safely through a maze containing 90° left and right turns, T-intersections and even dead ends!
Watch the introductory video to this project below!
Before continuing, make sure that you have already completed this checklist. Especially if you have not already completed the Robotics with the Boe-Bot text, do that before you continue here. It’s a great way to get started with Robotics!
(1) Boe-Bot Robot, assembled and tested (#28132)
The parts below are included in the Boe-Bot Robot kit:
(1) Piezospeaker (#900-00001)
(1) QTI Line Follower AppKit (#28108)
The parts below are included in the QTI Line Follower AppKit:
(4) 3-pin Male-Male Headers (#451-00303)
(4) QTI Sensor Modules (#555-27401)
(4) 3/8” 4-40 pan-head screws (#700-00016)
(4) 7/8” 4-40 pan-head screws (#710-00007)
(4) 1” round standoffs (#700-00060)
(4) 1/2" round spacers (#713-00007)
(4) Nylon washers
(4) 10” servo cable extenders (#805-00011)
For this activity, you will also need to supply your own:
#2 Philips-head screwdriver
Black ¾-inch electrical tape
White poster board
Source Code for Boe-Bot Maze Navigation [2]
Follow the instructions included with the QTI Line Follower AppKit (#28108) (see Downloads & Resources section of the product page for a digital copy). Some hardware modifications are needed for this application. In the AppKit instructions, each QTI is mounted edge to edge, but in this application, more spacing will be required between the QTIs so the Boe-Bot can detect turns and other obstacles. Use Figure 1 as a guide and mount the QTIs so the two center QTIs are 0.8 cm apart, and the outermost sensors are 2 cm from the center QTIs.
Figure 1 - Mounted QTI Sensors
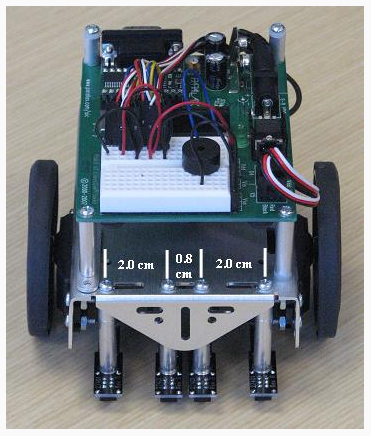
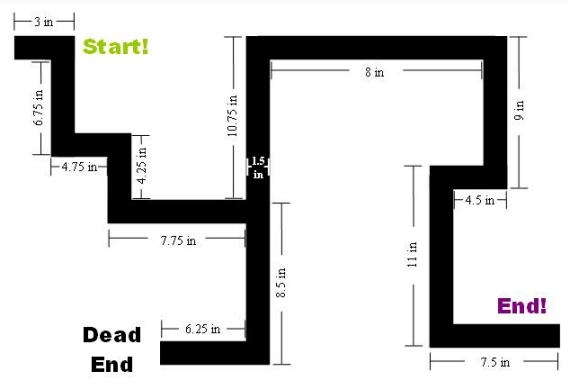
Figure 2 shows a maze with a variety of obstacles for the Boe-Bot to navigate, including short and long straight tracks, 90° left and right turns, a T-intersection, and a dead end. These obstacles pose a number of navigation challenges that you can solve, and in doing so, improve your Boe-Bot’s performance in larger and more complex mazes. When constructing your maze, use a large piece of poster board and make sure each lane stripe is 1.5 inches wide of black tape. Figure 2 shows the maze designed for this activity (not to scale).
Figure 2 - Boe-Bot Electrical Tape Maze
Before we begin, you should know that the last program in this project may be larger than the example programs you may have tried in Robotics with the Boe-Bot. That’s because there are a lot of conditions that have to be taken into account! This “mini-project” demonstrates how to take a complex problem and break it down into small pieces in order to successfully solve it. To do this, we’re going to have to calibrate our Boe-Bot to maneuver through each condition before putting the whole thing together. This will save us time when troubleshooting if we know that each individual piece works as it should.
Make Sure You Complete Each Calibration Step!
It is very important to follow all calibration instructions with your Boe-Bot and update the values in the code that they determine experimentally. If you skip any steps or try to run the example code as is, it probably will not work.
Keep in mind that the value of the Boe-Bot is that, while fun to play with, it is not a toy robot with a limited set of functions. It is a robot with a prototyping platform that can be whatever you design it to be. That is, if you’re willing to put in a little extra work, and learn a little something!
Since the Boe-Bot will need to move slowly at some points in the maze, we’ll have to slow down the servos form the normal 850, 650 PUSLOUT durations. This will help ensure that QTI readings aren’t missed as the Boe-Bot navigates through the maze, and you can use the same testing procedure introduced in Robotics with the Boe-Bot Chapter 4, Activity #2.
To slow forward movement, remember that a PULSOUT value of 750 stops the servo motors. So we’ll want to pick values closer to 750 so the Boe-Bot slowly moves forward. For further explanation, take a look at see the Rotational Velocity vs. Pulse Width for Servo graph in Robotics with the Boe-Bot Chapter 3, Activity #4. Notice how the speed only really starts slowing as the pulses approach 700 from 650 and 800 from 850, so don’t worry if the change from 850 to 840 does not appear to have any effect.
Below is an adaptation of BoeBotForwardTenSeconds.bs2, and can be used to calibrate your Boe-Bot.
' SlowlyForward.bs2
' Calibrate your Boe-Bot to slowly move forward in a straight line.
' {$STAMP BS2}
' {$PBASIC 2.5}
counter VAR Word
FOR counter = 1 TO 407
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
END
Once you’ve got the slow-forward code calibrated, the next step is to calibrate 90° turns. There are a lot of them in the maze, so do a good job here. It’s simple, and you’ve already calibrated your Boe-Bot to complete one in Robotics with the Boe-Bot Chapter 4, Activity #2…right? If not, do not proceed until you are done with this important step! Now all we have to do is program the Boe-Bot to turn left when the maze path does. You can set conditions for the Boe-Bot to follow using SELECT…CASE statements. That way, if the QTIs are sending readings that the tell the BASIC Stamp the Boe-Bot needs to turn left, the BASIC Stamp can then send pulses to the servos to execute a 90° left turn.
Confused?
If you don’t understand SELECT…CASE statements and how they apply here, go back and visit Boe-Bot Line Following with Four QTI Sensors [3] for detailed information on how line-following with QTIs works.
Use the sample code below and adjust the values as necessary so your Boe-Bot executes 90° left turns while staying centered on the maze path.
' MazeNavigation_LeftTurn.bs2
' Boe-Bot turns left based on values from the QTIs.
' {$STAMP BS2}
' {$PBASIC 2.5}
qtis VAR Nib ' qti black/white states
pulseCount VAR Byte ' FOR..NEXT loop counter for turning
OUTB = %1111 ' Set OUTB bits to 1
DO ' Main DO...LOOP
GOSUB Check_Qtis ' Get QTI states
SELECT qtis ' Control servo speeds/directions
CASE %0110 ' Straight ahead
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
CASE %1110
GOSUB Turn_Left
CASE ELSE ' Do nothing
PAUSE 3
ENDSELECT
LOOP
Check_Qtis:
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black.
DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
Turn_Left:
FOR pulseCount = 0 TO 15 ' Go forward a bit so Boe-Bot
PULSOUT 13, 770 ' stays on course
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 24 ' Turn left, about 90-degrees
PULSOUT 13, 650
PULSOUT 12, 650
PAUSE 20
NEXT
RETURN
Calibrating your Boe-Bot to execute 90° right turns works the same way as calibrating left turns. These values probably won’t be a mirror image of left turns, so it’s important to test and find the necessary PULSOUT duration values to make the right turns as reliable as the left turns. Use the sample code below and adjust the values as necessary so your Boe-Bot executes 90° right turns while staying centered on the maze path.
' MazeNavigation_LeftTurn.bs2
' Boe-Bot turns left based on values from the QTIs.
' {$STAMP BS2}
' {$PBASIC 2.5}
qtis VAR Nib ' qti black/white states
pulseCount VAR Byte ' FOR..NEXT loop counter for turning
OUTB = %1111 ' Set OUTB bits to 1
DO ' Main DO...LOOP
GOSUB Check_Qtis ' Get QTI states
SELECT qtis ' Control servo speeds/directions
CASE %0110 ' Straight ahead
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
CASE %0111
GOSUB Turn_Right
CASE ELSE ' Do nothing
PAUSE 3
ENDSELECT
LOOP
Check_Qtis:
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
Turn_Right:
FOR pulseCount = 0 TO 15 ' Go forward a bit so Boe-Bot
PULSOUT 13, 770 ' stays on course
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 24 ' Turn right, about 90-degrees
PULSOUT 13, 850
PULSOUT 12, 850
PAUSE 20
NEXT
RETURN
Alright, now what happens when the Boe-Bot encounters a T-Intersection? One solution, which we will use here, is to program the Boe-Bot to make a random decision when it reaches the T-Intersection. We can do this by generating a pseudo-random number, and then turn left or right based a single bit of that random number (0 or 1).
In MazeNavigation_TIntersection.bs2, a pseudo-random number ranging from 0 to 65535 is generated each time through the Main loop using the RANDOM command. By looking at a single bit of that number, the Boe-Bot can turn left or right depending if the value of that bit is 0 or 1.
Why use the RANDOM command in the Main loop and not in the T_Intersection subroutine?
Each time the RANDOM command is used, it creates a pseudo-random number. This means that even though the number generated appears random, it is aaaactually generated by a logic operation using the initial value (the “seed”) in the variable named rng to “tap” into a sequence of 65535 essentially random numbers. So, if the command RANDOM rng was placed in the T_Intersection subroutine, the same value of rng would be used, generating the same sequence of values each time. However, by putting this command in the Main routine, the value of rng will change each time through the loop, producing a more desirable set of pseudo-random numbers.
For more information, look up the RANDOM command in the BASIC Stamp Syntax and Reference Manual or the BASIC Stamp Editor Help.
Using MazeNavigation_TIntersection.bs2, complete the following tests:
' MazeNavigation_TIntersection.bs2
' When all QTI sensors detect a black line, the Boe-Bot randomly decides to
' turn left or right. This codes simulates the decision by printing "Turn
' Left!” or "Turn Right!" to the debug terminal.
' {$STAMP BS2}
' {$PBASIC 2.5}
rng VAR Word ' random number
turnDecision VAR rng.BIT0 ' Bit0 of the random number
qtis VAR Nib ' qti black/white states
OUTB = %1111 ' Set OUTB bits to 1
DEBUG CLS ' Clear the Debug screen
DO ' Main DO...LOOP
GOSUB Check_Qtis ' Get QTI states
RANDOM rng ' Create random number
SELECT qtis ' Control servo speeds/directions
CASE %0110 ' Straight ahead
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
CASE %1111
GOSUB T_Intersection
CASE ELSE ' Do nothing
PAUSE 3
ENDSELECT
LOOP
Check_Qtis:
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black
DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
T_Intersection:
IF (turnDecision = 0) THEN
DEBUG "Turn Right!", CR
PAUSE 100
ELSEIF (turnDecision = 1) THEN
DEBUG "Turn Left!", CR
PAUSE 100
ENDIF
RETURN
The dead end is another common maze obstacle, and there are a lot of different approaches to solve this problem. The program below handles it in the following way: the Boe-Bot will back up until it reaches the turn that led to the dead end, and then it will execute a 90° turn to get back on the maze path.
But what then? The Boe-Bot still made another turn that brought it to the dead end, and if it makes that turn again, it will return to start instead of continuing to the end. One way to solve this problem would be to create a new variable. Let’s call it “AI”. When this variable is equal to 1, the Boe-Bot will ignore the left turn that would take it back to Start. By creating a new subroutine named AI_Decision the Boe-Bot can execute left turns based on the value of the AI variable.
Use the following code to verify that your Boe-Bot can successfully navigate its way out of a dead end. Remember, some tweaking may be required!
' MazeNavigation_DeadEnd.bs2
' Boe-Bot backs up until it notices a turn and then moves forward again.
' {$STAMP BS2}
' {$PBASIC 2.5}
qtis VAR Nib ' qti black/white states
AI VAR Byte ' "Artificial Intelligence"
' remembers dead ends
pulseCount VAR Byte ' FOR..NEXT loop counter for turning
OUTB = %1111 ' Set OUTB bits to 1
DO ' Main DO...LOOP
GOSUB Check_Qtis ' Get QTI states
SELECT qtis ' Control servo speeds/directions
CASE %0110 ' Straight ahead
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
CASE %1110
GOSUB AI_Decision
CASE %0000 ' Back-up until it sees another turn
GOSUB Dead_End
CASE ELSE ' Do nothing
PAUSE 3
ENDSELECT
LOOP
Check_Qtis:
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black
DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
AI_Decision:
IF (AI = 1) THEN ' If AI = 1, Boe-Bot was in dead end
AI = 0 ' Set AI variable to 0
GOSUB Ignore_Turn ' Ignore turn that leads to Start
ELSEIF (AI = 0) THEN ' If AI = 0, Boe-Bot was not in
GOSUB Turn_Left ' dead end, so it's OK to turn left.
ENDIF
RETURN
Ignore_Turn:
FOR pulseCount = 0 TO 50
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
RETURN
Turn_Left:
FOR pulseCount = 0 TO 15 ' Go forward a bit so Boe-Bot stays
PULSOUT 13, 770 ' on course.
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 17 ' Turn left, about 90-degrees
PULSOUT 13, 650
PULSOUT 12, 650
PAUSE 20
NEXT
RETURN
Dead_End:
DO
GOSUB Check_Qtis
PULSOUT 13, 730
PULSOUT 12, 770
PAUSE 20
LOOP UNTIL (qtis = %0111)
IF (qtis = %0111) THEN
PAUSE 20
FOR pulseCount = 0 TO 15
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 17
PULSOUT 13, 850
PULSOUT 12, 850
PAUSE 20
NEXT
ENDIF
AI = 1
RETURN
The final calibration step will be to write code that keeps the Boe-Bot centered on the electrical tape, since there are several factors that could knock it off course: the tape not being perfectly straight, slippage during turns, etc. Keep in mind that line correction can be difficult when navigating through mazes, since there are a lot of different ways that the Boe-Bot can move off track, and each response would be different. In the solution below, whenever the Boe-Bot detects that it has gone off course, it responds as follows:
This code was taken through several iterations of calibration, testing, recalibration, re-testing, etc. Since the values may be completely different you may also have to go through several iterations of test and recalibrate. Keep in mind that these steps are essential for successful line following though the maze, since the center sensors need to be on the line when moving forward. Use the following steps to make sure the Boe-Bot can stay centered on the maze path:
' MazeNavigation_StayOnStripe.bs2
' Calibration program to keep the Boe-Bot on the electrical tape path.
' {$STAMP BS2}
' {$PBASIC 2.5}
qtis VAR Nib ' qti black/white states
pulseCount VAR Word ' FOR...NEXT loop counter for smooth
' turning.
OUTB = %1111 ' Set OUTB bits to 1
DO ' Main DO...LOOP
GOSUB Check_Qtis ' Get QTI states
SELECT qtis ' Control servo speeds/directions
CASE %0110 ' Mid Left and Right sensors detected, go forward
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
CASE %1000 ' Far Left sensor detected
GOSUB BackOnTrack_OneSensorLeft
CASE %1100 ' Far and Mid Left sensors detected
GOSUB BackOnTrack_TwoSensorsLeft
CASE %0001 ' Far Right sensor detected
GOSUB BackOnTrack_OneSensorRight
CASE %0011 ' Far and Mid Right sensor detected
GOSUB BackOnTrack_TwoSensorsRight
CASE ELSE ' Do nothing
PAUSE 3
ENDSELECT
LOOP
Check_Qtis:
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black
DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
BackOnTrack_OneSensorLeft:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO ' Slowly rotate until the middle
GOSUB Check_Qtis ' QTIs are back on the line
PULSOUT 13, 750
PULSOUT 12, 740
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate left for
PULSOUT 13, 750 ' 20 pulses and then rotate right
PULSOUT 12, 740 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 770
PULSOUT 12, 750
PAUSE 20
NEXT
ENDIF
RETURN
BackOnTrack_TwoSensorsLeft:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 750 ' QTIs are back on the line
PULSOUT 12, 740
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate left for
PULSOUT 13, 750 ' 20 pulses and then rotate right
PULSOUT 12, 730 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 770
PULSOUT 12, 750
PAUSE 20
NEXT
ENDIF
RETURN
BackOnTrack_OneSensorRight:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 760 ' QTIs are back on the line
PULSOUT 12, 750
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate right for
PULSOUT 13, 760 ' 20 pulses and then rotate left
PULSOUT 12, 750 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 750
PULSOUT 12, 730
PAUSE 20
NEXT
ENDIF
RETURN
BackOnTrack_TwoSensorsRight:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 760 ' QTIs are back on the line
PULSOUT 12, 750
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate right for
PULSOUT 13, 770 ' 20 pulses and then rotate left
PULSOUT 12, 750 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 750
PULSOUT 12, 730
PAUSE 20
NEXT
ENDIF
RETURN
Congratulations, you’ve completed the calibration process! After calibration, the final program may seem long, but it’s really just a compilation of all the short programs we’ve just written and tested. Breaking maze navigation, or and any other robotic problem, down into small pieces and calibrating at each step helps ensure success. If you develop these habits now, it can save you tremendous amounts of time preparing for your next robotics project or contest entry.
The final code has some extra features to make navigation more reliable. For example, there’s a Turn_Check subroutine that prevents the Boe-Bot from misinterpreting %0111 or %1110 as a full 90° turn. It’s true that those QTI patterns do sometimes indicate a turn, but the same patterns can also indicate that the Boe-Bot has just drifted a little to the left or right of the line. The Turn_Check subroutine figures out whether the Boe-Bot is off course or on a turn by:
Another extra feature of the final code is that each SELECT…CASE statement in the main routine is sent to a subroutine. This is because we want the code to execute as quickly as possible. Each QTI reading is crucial to accurate maze navigation, so the faster the main routine executes, the more QTI readings we obtain. If we put every movement in the main routine, this severely slows down our code, which could cause missed readings in important areas, such as turns or T-intersections. That’s why the code in the main routine only checks the QTI states, and depending on the result, gets sent to the corresponding subroutine.
Before the code below will work on your Boe-Bot, it is essential for you to go through and update all the values you determined in this project’s calibration and testing steps. When running your Boe-Bot through the maze, you may find that some values need to be adjusted to account for unforeseen obstacles. That’s OK! Experiment with the code until your Boe-Bot can consistently navigate through your electrical tape maze.
' -----[ Title ]-------------------------------------------------------------
' FullMazeNavigation.bs2
' Navigate your Boe-Bot through a "maze" made of electrical tape using the QTI
' Line Follower App Kit.
' IMPORTANT: This program has several operations that have to be tuned before
' it will work right! Follow the instructions above before running this
' program.
' {$STAMP BS2} ' Target device = BASIC Stamp 2
' {$PBASIC 2.5} ' Language = PBASIC 2.5
' -----[ Variables ]---------------------------------------------------------
rng VAR Byte ' Random number generator variable
pulseCount VAR Byte ' FOR..NEXT loop counter for turning
turnDecision VAR rng.BIT0 ' Bit 0 of random number generated
AI VAR Bit ' "AI" remembers dead ends
qtis VAR Nib ' QTI black/white states
' -----[ Initialization ]----------------------------------------------------
OUTB = %1111 ' Set OUTB bits to 1
AI = 0 ' Set AI variable to 0
FREQOUT 15, 1000, 2000 ' Battery Tester
' -----[ Main Routine ]------------------------------------------------------
DO ' Main DO...LOOP
RANDOM rng ' Create a random number
GOSUB Check_Qtis ' Get QTI states
SELECT qtis
CASE %0110 ' Mid Left and Right sensors detected, go forward
GOSUB Forward
CASE %1100 ' Far and Mid Left sensors detected = off track
GOSUB BackOnTrack_TwoSensorsLeft
CASE %0011 ' Far and Mid Right sensor detected = off track
GOSUB BackOnTrack_TwoSensorsRight
CASE %1110, %0111 ' Turn Detected
GOSUB Turn_Check
CASE %1111 ' All sensors detected = T-Intersection
GOSUB T_Intersection
CASE %0000 ' No track = dead end
GOSUB Dead_End
CASE %0001 ' Far Right sensor detected = off track
GOSUB BackOnTrack_OneSensorRight
CASE %1000 ' Far Left sensor detected = off track
GOSUB BackOnTrack_OneSensorLeft
CASE ELSE ' Any other combination, move forward until
PULSOUT 13, 770 ' something else is detected.
PULSOUT 12, 730
PAUSE 20
ENDSELECT
LOOP
' -----[ Subroutines - Check_Qtis ]------------------------------------------
' Checks the state of each QTI Sensor. 0 means white surface, 1 means black
Check_Qtis:
DIRB = %1111 ' P7..P4 -> output
PAUSE 0 ' Delay = 230 us
DIRB = %0000 ' P7..P4 -> input
PAUSE 0 ' Delay = 230 us
qtis = INB ' Store QTI outputs in INB
RETURN
' -----[ Subroutines - Forward ]---------------------------------------------
' Boe-Bot moves forward.
Forward:
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
RETURN
' -----[ Subroutines - Turn_Check ]------------------------------------------
' When three sensors are detected, this subroutine checks if there is actually
' a turn, or if the Boe-Bot got off track.
Turn_Check:
PULSOUT 13, 750 ' Stop moving
PULSOUT 12, 750
FOR pulseCount = 0 TO 5 ' Move forward a bit
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
GOSUB Check_Qtis ' Check the new QTI states
SELECT qtis
CASE %1110 ' Left turn is detected
GOSUB AI_Decision
CASE %0111 ' Right turn is detected
GOSUB Turn_Right
CASE ELSE ' Boe-Bot was off track,
RETURN ' return to main routine loop
ENDSELECT
RETURN
' -----[ Subroutines - AI_Decision ]-----------------------------------------
' When a left turn is detected, check if the Boe-Bot hit a dead end last.
' This will keep it from returning to Start.
AI_Decision:
IF (AI = 1) THEN ' If the AI variable is 1, Boe-Bot was in dead end
AI = 0 ' Set AI variable to 0
GOSUB Ignore_Turn ' Ignore the turn that leads to Start
ELSEIF (AI = 0) THEN ' If the AI variable is 0, Boe-Bot was not in
GOSUB Turn_Left ' dead end, so it's OK to turn left.
ENDIF
RETURN
' -----[ Subroutines - Ignore_Turn ]-----------------------------------------
' AI variable was 1, so ignore the left turn by going forward for 50 pulses.
Ignore_Turn:
FOR pulseCount = 0 TO 50
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
RETURN
' -----[ Subroutines - Turn_Left ]-------------------------------------------
' Boe-Bot executes a left turn.
Turn_Left:
FOR pulseCount = 0 TO 15 ' Go forward a bit so Boe-Bot stays on course
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 17 ' Turn left, about 90-degrees
PULSOUT 13, 650
PULSOUT 12, 650
PAUSE 20
NEXT
RETURN
' -----[ Subroutines - Turn_Right ]------------------------------------------
' Boe-Bot executes a right turn.
Turn_Right:
FOR pulseCount = 0 TO 15 ' Go forward a bit so Boe-Bot stays on course
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 17 ' Turn right, about 90-degrees
PULSOUT 13, 850
PULSOUT 12, 850
PAUSE 20
NEXT
RETURN
' -----[ Subroutines - T_Intersection ]--------------------------------------
' Boe-Bot makes a random turn when it comes to a T-Intersection
T_Intersection:
IF turnDecision = 0 THEN ' If Bit0 is 0 then turn right
GOSUB Turn_Right
ELSEIF turnDecision = 1 THEN ' If Bit0 is 1 then turn left
GOSUB Turn_Left
ENDIF
RETURN
' -----[ Subroutines - Dead_End ]--------------------------------------------
' Boe-Bot detects a dead end, backs up, and turns around to get back on track.
Dead_End:
DO
GOSUB Check_Qtis
PULSOUT 13, 730
PULSOUT 12, 770
PAUSE 20
LOOP UNTIL (qtis = %0111)
IF (qtis = %0111) THEN
PAUSE 20
FOR pulseCount = 0 TO 15
PULSOUT 13, 770
PULSOUT 12, 730
PAUSE 20
NEXT
FOR pulseCount = 0 TO 17
PULSOUT 13, 850
PULSOUT 12, 850
PAUSE 20
NEXT
ENDIF
AI = 1
RETURN
' -----[ Subroutines - BackOnTrack_TwoSensorsLeft ]--------------------------
' Boe-Bot is off track. Boe-Bot slowly rotates until the two middle sensors
' are detected, and then centers itself on the line.
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 750 ' QTIs are back on the line
PULSOUT 12, 740
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate left for
PULSOUT 13, 750 ' 20 pulses and then rotate right
PULSOUT 12, 730 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 770
PULSOUT 12, 750
PAUSE 20
NEXT
ENDIF
RETURN
' -----[ Subroutines - BackOnTrack_TwoSensorsRight ]-------------------------
' Boe-Bot is off track. Boe-Bot slowly rotates until the two middle sensors
' are detected, and then centers itself on the line.
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 760 ' QTIs are back on the line
PULSOUT 12, 750
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate right for
PULSOUT 13, 770 ' 20 pulses and then rotate left
PULSOUT 12, 750 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 750
PULSOUT 12, 730
PAUSE 20
NEXT
ENDIF
RETURN
' -----[ Subroutines - BackOnTrack_OneSensorLeft ]---------------------------
' Boe-Bot is off track. Boe-Bot slowly rotates until the two middle sensors
' are detected, and then centers itself on the line.
BackOnTrack_OneSensorLeft:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO ' Slowly rotate until the middle
GOSUB Check_Qtis ' QTIs are back on the line
PULSOUT 13, 750
PULSOUT 12, 740
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate left for
PULSOUT 13, 750 ' 20 pulses and then rotate right
PULSOUT 12, 740 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 770
PULSOUT 12, 750
PAUSE 20
NEXT
ENDIF
RETURN
' -----[ Subroutines - BackOnTrack_OneSensorRight ]--------------------------
' Boe-Bot is off track. Boe-Bot slowly rotates until the two middle sensors
' are detected, and then centers itself on the line.
BackOnTrack_OneSensorRight:
PULSOUT 13, 750 ' Stop
PULSOUT 12, 750
DO
GOSUB Check_Qtis ' Slowly rotate until the middle
PULSOUT 13, 760 ' QTIs are back on the line
PULSOUT 12, 750
PAUSE 20
LOOP UNTIL (qtis = %0110)
IF (qtis = %0110) THEN ' When the middle QTIs are back
FOR pulseCount = 1 TO 20 ' on the line, rotate right for
PULSOUT 13, 760 ' 20 pulses and then rotate left
PULSOUT 12, 750 ' for 10 pulses to center the Boe-
PAUSE 20 ' Bot on the line.
NEXT
FOR pulseCount = 0 TO 10
PULSOUT 13, 750
PULSOUT 12, 730
PAUSE 20
NEXT
ENDIF
RETURN
Although this code was written specifically for the maze shown in Figure 2 (previous section), it can be adapted to a variety of other situations as well as expanded for more complex mazes. Challenge yourself by creating a random maze and see if you can program your Boe-Bot to get through it! You can also challenge your friends and see who can best navigate through mazes, or who can do it the fastest. As a final touch, try adding obstacles that can be detected by whiskers, infrared or light sensors, and try programming your Boe-Bot to navigate around these obstacles and get back on the maze.

Links
[1] https://learn.parallax.com/node/719
[2] https://learn.parallax.com/sites/default/files/Files/Docs/Projects/Maze/QTI-Maze.zip
[3] https://learn.parallax.com/project/boe-bot-line-following-four-qti-sensors