This tutorial guides you through building your SumoBot WX Robots. These robots are designed for wrestling, and meet the Mini Sumo competition rules: maximum 10 x 10 cm footprint, and maximum weight of 500 grams.
The standard SumoBot WX has two drive wheels and a front scoop designed for pushing or flipping over its opponent. It includes two sets of sensors: QTI line sensors to keep the robot on the playing surface, and infrared emitter/detector pairs used to locate its opponent.
The SumoBot WX control board features a removable Propeller FLiP module brain, and many ports for accessories.
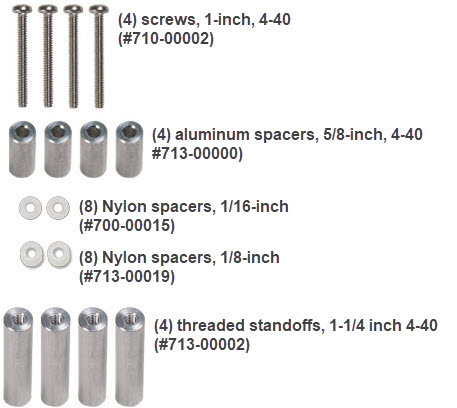
You will need:
You will be ready to start programming your SumoBot WX robots! The next tutorials will show you how to make your robots drive, use its sensors, and wrestle in the competition ring.
After mastering the basics, you may add a Ping))) Distance Sensor, a tilt sensor, or a ESP8266 WiFi module for wireless programming and remote control.
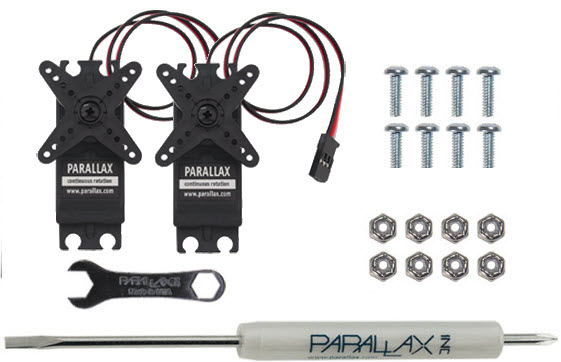
The SumoBot WX Competition Kit builds TWO complete robots.
The images below show the parts to build ONE robot.




The following instructions are for building ONE robot. If you are building both robots in your kit, either build one completely before starting the other one, or repeat each step for the other robot as you go.
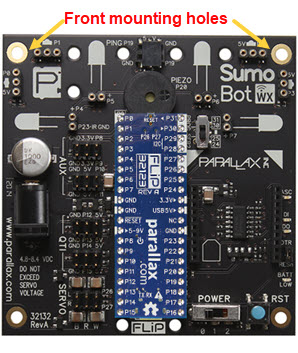
The blue Propeller FLiP module is the brains of your SumoBot robot. It plugs into the black SumoBot WX control board, which provides connections to battery power, servo motors, sensors, and the robot chassis.

There is also a WX WiFi module socket for optional wireless programming and communication (WX WiFi module not included).



In this step you will attach the battery holder to the chassis. Be gentle with the Nylon screws and nuts in this step. Don't overtighten.


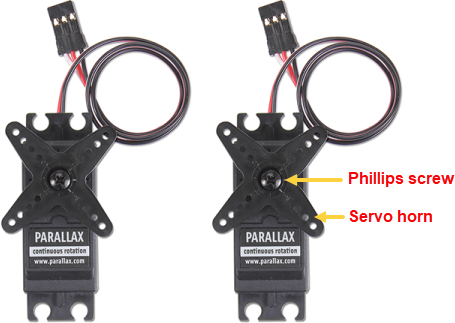
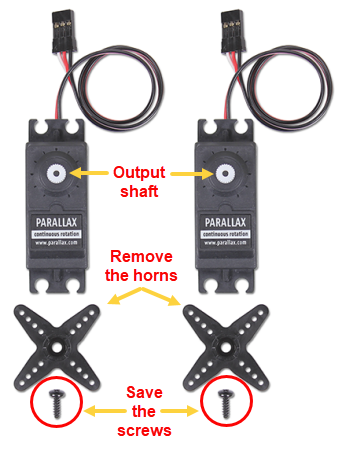
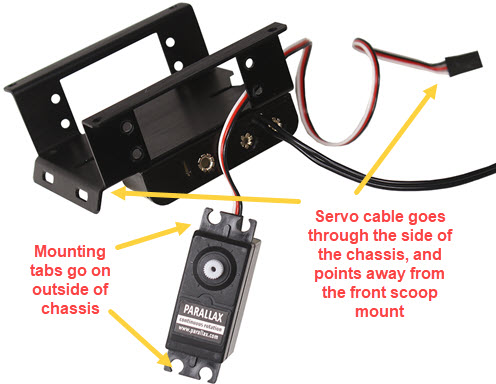
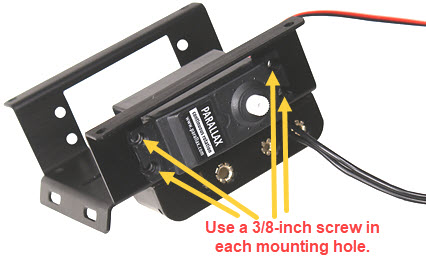
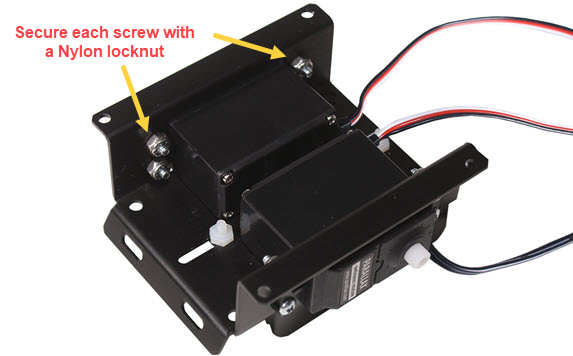
The Parallax Continuous Rotation Servos are the motors for your robot, that can be controlled by the programs you create.
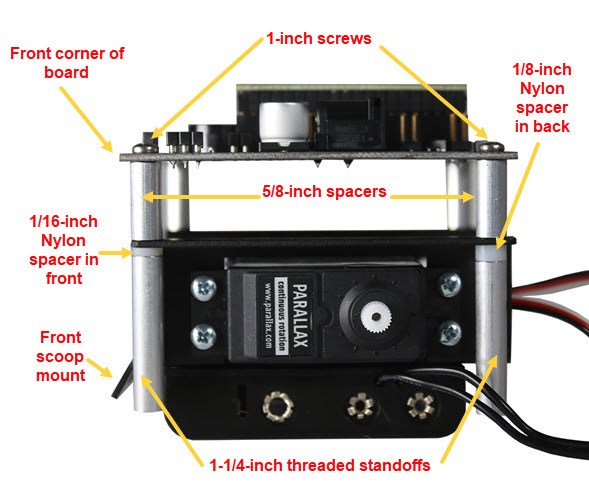
This step adds hardware to secure the SumoBot WX board to the chassis now, and also to hold QTI line sensors in the future.
The SumoBot WX features wheels with tires that seat squarely on the wheel rim. These custom molded tires are made from TPE55. This material is grippy but not too grippy, so as to not cause servo motors to simply stall in a wrestling match.



The scoop is for pushing or flipping your robot opponent during a wrestling match. Note that the slots for attaching the scoop allow it to be positioned slightly higher or lower.


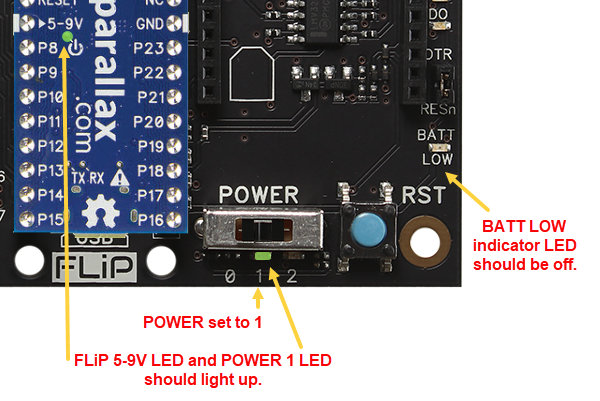
The SumoBot WX Board has servo ports for plugging in the servos cables, and a 3-position switch to power the servos only when you want to.
The SumoBot PCB has a three-position power switch.



High-capacity Tenergy 1.2 V AA NiMH batteries [1] are strongly recommended for the SumoBot WX robots. These rechargeable batteries give a very long run time, up to 120 minutes. Regular 1.5V alkaline batteries may also be used, but the run time is much shorter, about 30 minutes.



Links
[1] https://www.parallax.com/product/752-00022