Put the safety glasses on immediately! The Gripper has small parts, including a torsion spring which may be inadvertently released during assembly. Note that this step has slightly modified instructions if you are using a Shield-Bot with Arduino.
- Locate the small bag of servo horn connector parts.
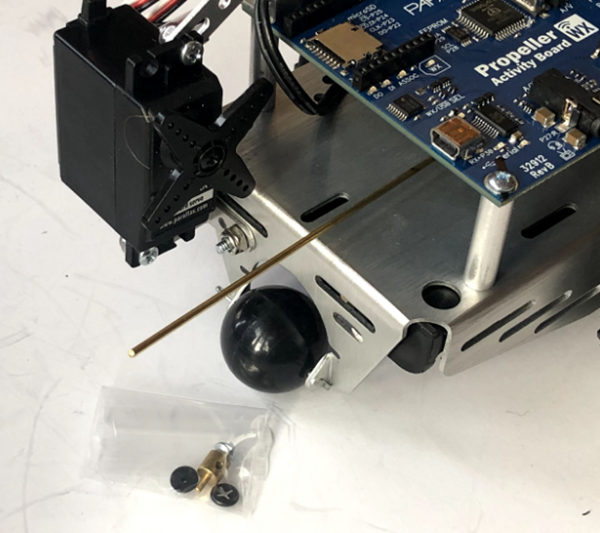
- Remove the servo horn from the servo and SAVE THE BLACK SCREW.

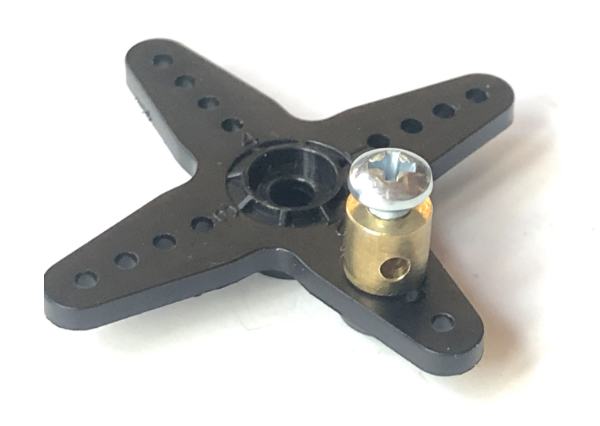
- Mount the connector to the top of the servo horn. The hole to use depends on which robot you have:
- For the Boe-Bot, ActivityBot, or cyber:bot: mount the servo horn connector parts on the second hole from the inside.
- For the Shield-Bot, mount the servo horn connector parts on the third hole from the inside, to provide clearance for the Arduino Uno.
- Find the flat, metal internal star-shaped keeper which attaches to the brass post. Press it on carefully and put the rubber dome over the top. Use pliers to lightly press the entire assembly together.
- Attach the small screw to the brass keeper.
- Close the Gripper as shown.
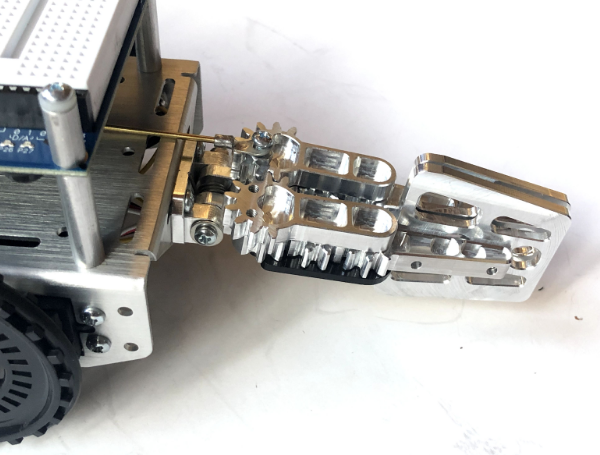
- Place the servo horn back on the servo, with the brass wire keeper and brass rod in place. When centering the servo horn on the servo spline, verify that the middle of the servo’s range of motion moves freely at least 90 degrees (in both directions).
- Secure the servo horn with the saved black servo screw.
- Cut the excess brass rod with right-angle cutters, allowing an inch or two of extra wire in case adjustments need to be made.
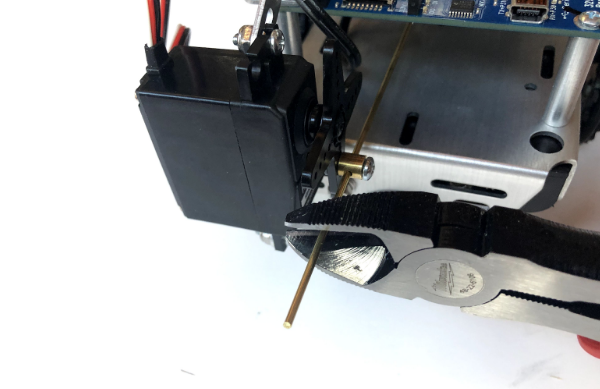
- Check the brass rod for clearance from other wires in the robot chassis. Move the wires around as necessary to ensure that the brass rod doesn’t touch.
- If you are using a Shield-Bot, make sure the brass rod does not touch the bottom of the Arduino Uno. If you need more clearance, move the brass keeper to the outermost hole in the servo horn.
