RFID Reader
 This tutorial will show you how connect the RFID Card Reader to the Propeller microcontroller; you'll also learn how to both read a tag’s ID number and use that data in a program.This tutorial will show you how connect the RFID Card Reader to the Propeller microcontroller; you'll also learn how to both read a tag’s ID number and use that data in a program.
This tutorial will show you how connect the RFID Card Reader to the Propeller microcontroller; you'll also learn how to both read a tag’s ID number and use that data in a program.This tutorial will show you how connect the RFID Card Reader to the Propeller microcontroller; you'll also learn how to both read a tag’s ID number and use that data in a program. Discover how easy it is to add 2-axis joystick function to your Propeller C project with this quick and easy Simple Devices tutorial.
Discover how easy it is to add 2-axis joystick function to your Propeller C project with this quick and easy Simple Devices tutorial.
ONLY FOR EXTERNAL ENCODERS!
If you are using Feedback 360° servos, go to Feedback 360 Encoder Calibration instead.
If your ActivityBot has external encoders, you MUST calibrate it before running any other example programs. This one-time calibration is necessary for the Robot blocks to measure and correct distances and speeds, using information from the ActivityBot encoders.
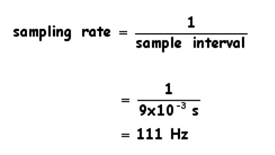
LineFollowWithCheckQtis.bs2 checks the QTIs and updates the servos every 9 ms. Remember that for a constant interval, the QTI sampling rate is the reciprocal of the sample interval. Since the sample interval is 9 ms, which is 0.009 or 9 x 10-3, the sampling rate is:
The ability to make a robot follow light (or run away from light like a bug on your kitchen floor) was an early goal of robotics' research. Why light following? There was potential for robots to be able to use light, particularly sunlight, as a renewable source of power. NASA and JPL’s Mars Spirit and Opportunity robotic rovers use solar panels to recharge their batteries. It makes sense then that such robots might be programmed to seek out light, and avoid darkness.
 Connect your VGA monitor to your Propeller Activity Board with the VGA SIP Adapter, then display text using the vgatext C library.
Connect your VGA monitor to your Propeller Activity Board with the VGA SIP Adapter, then display text using the vgatext C library.
Only for FEEDBACK 360° SERVOS!
If you are using external encoders, go to External Encoder Calibration instead.
If your ActivityBot is using Feedback 360° servos, calibration is optional, but it will improve the accuracy of driving maneuvers. This one-time calibration aids the Robot blocks in measuring and correcting distances and speeds, using information from the servo's feedback connection.
A hobby servo is a small device that controls the position of flaps, rudders, and steering in many radio-controlled toy planes, boats, and cars. The Parallax Standard Servo is a hobby servo, and it’s also useful in many robotics and animatronics projects. Since it can both move to and hold a position, it is ideal for tasks like rotating a distance sensor or controlling the fingers in a robotic hand.
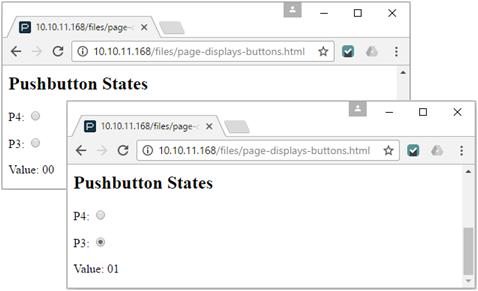
Now that we have a way for the page to make the browser ask the Propeller questions, let's make the page ask for sensor states. In this example, the page makes the browser ask the Propeller about pushbutton states every 3 seconds and updates the states of radio buttons and text displaying the button states.
Only for External Encoders!
If you are using Feedback 360° servos, go to Feedback 360° Encoder Calibration instead.
Before running any other example programs, your ActivityBot needs to be calibrated. This is a one-time calibration that the abdrive library needs for measuring and correcting disances and speeds, using information from the ActivityBot encoders.