Configure the Gimbal
With the gimbal mounted, you now need to configure it's firmware. These instructions will reference the Tarot T-2D Assembly Manual v1.1, as revised by John C. Lin (3rd Party).
Make sure to start with the gimbal OFF (battery is unplugged), and your camera mounted in the gimbal.
- Install the ZYX-BMGC Software. (Software v1.5 download link) Note that you may need a computer running Microsoft Windows XP or 7.
- Connect the supplied USB programming cable to the Gimbal Controller port on the circuit board of the T-2D (see picture below) and then to your computer using the USB adapter.
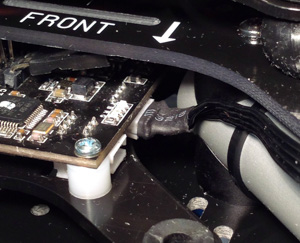
- Follow the "Gimbal Controller Software User Interface Instructions" in the Assembly Manual to configure the gimbal controller. We strongly recommend initially using these settings for the Gimbal Controller.
- Connect the supplied USB programming cable to the Motor Controller port on the circuit board of the T-2D (see picture below) and then to your computer using the USB adapter.
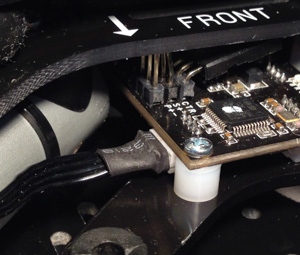
- Follow the "Gimbal Motor Driver Software User Interface Instructions" in the Assembly Manual to configure the motor driver. We strongly recommend initially using these settings for the Motor Driver.
Gimbal Operation
Every time you power-up the gimbal, it goes through a calibration procedure that takes about 15 seconds. During this time, it is critical that you do not move or bump the gimbal or quadcopter, that there are no obstructions restricting the gimbal's movments, and that there is a camera in the gimbal. Check out the "LED Indicators" section of the Assembly Manual for an explanation of the status indicator lights.
For additional information on RC control of the gimbal, please see the Assembly Manual.