Propeller BlocklyProp Block Reference
-
About Board Types
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
About Naming Things
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
About Multicore
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
About BlocklyProp Updates
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
BlocklyProp Bulk Project Download
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Control
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Operators
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Values
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Arrays
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Variables
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Functions
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Pin states
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Communicate
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Sensor
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Memory
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Analog / Pulses
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Sound Impact Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Audio
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
ColorPal Wiring & Code Example
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Servo
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Badge Lock
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Robot
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Badge LEDs
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
PIR Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
System
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Temp & Humidity
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Temperature & Humidity Sensor Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Badge Buttons
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Memsic 2125 Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
GPS
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Fingerprint Scanner Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Graph
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Joystick Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
RFID Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
PING))) Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
4×4 Keypad Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Air Quality BME680
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Badge Display
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
LIS3DH Accelerometer
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
4 x 4 Keypad
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
ePaper
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
GPS Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
IR Remote Wiring & Example Code
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Fingerprint Scanner
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Advanced WX
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Simple WX
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
WX WiFi
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
RGB LEDs
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
LSM9DS1 9-axis IMU
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
PWM
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Pulse in / out
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Voltage
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
RC time
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
ColorPal
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Sound Impact Sensor
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Sony Remote
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
RFID
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
PIR
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Ping))) Distance
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
MMA7455
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Memsic 2-axis
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
2-Axis Joystick
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
HMC5883L
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
XBee
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Protocols
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Terminal
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
OLED
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
-
Serial LCD
- About Board Types
- About Naming Things
- About Multicore
- About BlocklyProp Updates
- BlocklyProp Bulk Project Download
- Control
- Operators
- Values
- Arrays
- Variables
- Functions
- Pin states
- Communicate
- Sensor
- Memory
- Analog / Pulses
- Sound Impact Wiring & Example Code
- Audio
- ColorPal Wiring & Code Example
- Servo
- Badge Lock
- Robot
- Badge LEDs
- PIR Wiring & Example Code
- System
- Temp & Humidity
- Temperature & Humidity Sensor Wiring & Example Code
- Badge Buttons
- Memsic 2125 Wiring & Example Code
- GPS
- Fingerprint Scanner Wiring & Example Code
- Graph
- Joystick Wiring & Example Code
- RFID Wiring & Example Code
- PING))) Wiring & Example Code
- 4×4 Keypad Wiring & Example Code
- Air Quality BME680
- Badge Display
- LIS3DH Accelerometer
- 4 x 4 Keypad
- ePaper
- GPS Wiring & Example Code
- IR Remote Wiring & Example Code
- Fingerprint Scanner
- Advanced WX
- Simple WX
- WX WiFi
- RGB LEDs
- LSM9DS1 9-axis IMU
- PWM
- Pulse in / out
- Voltage
- RC time
- ColorPal
- Sound Impact Sensor
- Sony Remote
- RFID
- PIR
- Ping))) Distance
- MMA7455
- Memsic 2-axis
- 2-Axis Joystick
- HMC5883L
- XBee
- Protocols
- Terminal
- OLED
- Serial LCD
Robot
BlocklyProp reference for ROBOT blocks
 These blocks are ONLY available for the Propeller Activity Board WX board type.
These blocks are ONLY available for the Propeller Activity Board WX board type.
- These blocks ARE compatible with the original and WX versions of the Activity Board. See the BlocklyProp Robotics with the ActivityBot tutorial for many examples of these blocks in use.
- Check which ActivityBot version you have.
- Some blocks and settings are only for the ActivityBot 360° (#32600). Its Feedback 360° servos have internal encoders with a total of 4 wires.
- Some blocks and settings are for the original ActivityBot with external 3-wire encoders (#32500). Be sure
- These blocks are NOT compatible with the Scribbler S2 or S3 robot. See the Scribbler S3 Block Reference for more info.
Robot initialize

 This block launches a processor automatically. Use only on instance of this block per project.
This block launches a processor automatically. Use only on instance of this block per project.
The Robot initialize block is used to set up the robot to drive. If you forget to use this block at the beginning of your navigation programs, a triangle warning will appear on Robot drive… blocks as a reminder.

Choose a robot option from the drop-down:
- ActivityBot 360°: The ActivityBot 360° (#32600) with 4-wire Feedback360° servos and no external encoders.
- ActivityBot: The original ActivityBot robot (#32500) with external 3-wire encoders must be calibrated before use. This can be done using the ActivityBot calibrate block (below). The ActivityBot calibrate block is used by itself (it does not need the Robot initialize block).
- Arlo: for use with the Arlo Complete Robot System (#28966), including the DHB-10 motor controller and the Propeller Activity Board WX.
- Servo Differential Drive: Any Propeller-controlled robot** with two wheels that are driven with Parallax continuous rotation servos. Choosing this option will expand the block so you can specify the Propeller I/O pins driving the servos.

**See top of the page for Propeller board specifics.
Robot set acceleration

The Robot set acceleration block is used to set how quickly the motors change their speeds.
- The first drop-down determines whether this acceleration setting is for use with Robot drive speed blocks or Robot drive distance blocks.
- The second drop-down menu sets the acceleration in units of ticks per second squared. The range is 100 ticks/s2 to 2000 ticks/s2.
With the ActivityBot, when using Robot drive speed the default acceleration is 600 ticks/s2 unless changed with this block. Likewise, with the ActivityBot using Robot drive distance the default acceleration is 400 ticks/s2 unless changed with this block.
Robot drive speed
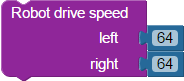
The Robot drive speed block sends control pulses to the robot’s servos that tells the servos what speed in which direction to drive. Negative speeds drive the wheels backward, and positive speeds drive the wheels forward. Turns can be accomplished by setting the wheels at different speeds. A speed of 0 (zero) stops the wheel*.
- For the ActivityBot, the speeds are roughly linear from 0 (stopped) to +/-128 (full speed and the maximum value used). The default acceleration is 600 encoder ticks/s2 unless changed with the Robot set acceleration block.
- For the Arlo Robot, the speeds are (to be determined!)
- For the Servo DIfferential Drive, the speed can be from -128 to 128, but In most cases, you will notice most of the change in speed from -100 to 100. This depends greatly on the type of servo or motor controller being driven.
Robot drive speed and Robot drive distance don’t mix! Use a Robot drive stop block in between them first, if you if you want your ActivityBot to switch from using one type of navigation to the other.
*If your Parallax CR Servo rotates slowly or buzzes when set to zero, you may need to center it. Very gently, insert a Philips tip screwdriver into the access hole in the servo’s case and slightly twist the potentiometer until the servo holds still.
Robot drive distance
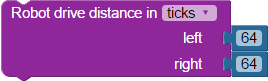
The Robot drive distance block makes the wheels of a robot drive a specific distance. This block only works with robots that have encoders: ActivityBot and Arlo. It does not work with Servo Differential Drive.
For the ActivityBot Robot:
- Units are in single encoder ticks, which are 3.25 mm long.
- The default drive speed is 64 ticks per second unless changed with the Robot set speed block.
- The default acceleration is 400 ticks/s2 unless changed with the Robot set acceleration block.
Robot drive speed and Robot drive distance don’t mix! Use a Robot drive stop block in between them first, if you if you want your ActivityBot to switch from using one type of navigation to the other.
Robot set maximum speed


The Robot set maximum speed block affects the drive speeds of two types of blocks, depending on the drop-down selection.
- Choose speed to set a maximum value that will be used with Robot drive speed blocks. The default max speed for Robot drive speed blocks is +/- 128 ticks per second unless changed to a smaller value with this block.
- Choose distance to change the drive speed used by Robot drive distance blocks. The default speed for Robot drive distance is 600 ticks per second unless changed with this block, but will not exceed 128 ticks per second.
Robot drive stop

The Robot drive stop block makes both right and left wheels stop turning.
Robot encoder counts

The Robot encoder counts block stores the current encoder count values in ticks, in the specified variables.
ActivityBot calibrate

Choose the supported robot from the drop-down menu:
- ActivityBot 360°: for use with the ActivityBot 360° robot (#32600) which uses Feedback 360° servos but no external encoders. Calibration is recommended but optional before running other navigation programs.
- ActivityBot: for use with the ActivityBot robot (#32500) which has external encoders. The ActivityBot MUST be calibrated before running other navigation programs.
- ActivityBot 360° (Parallaxy): for use with the Parallaxy Telepresence Robot (#32800). The robot MUST be built according to these letsrobot.readme.io instructions before calibration and use with the Parallaxy + Raspberry Pi + LetsRobot.tv system.
This block must be run as its own program with no other blocks.
ActivityBot display calibration

The ActivityBot calibrate block is ONLY for use with the ActivityBot robot (#32500), the ActivityBot 360° robot (#32600), and the Parallaxy Telepresence Robot (#32800)
The ActivityBot display calibration block displays information about the calibration values stored in the Activity Board’s onboard EEPROM. This block must be run as its own program, and it will display information to the terminal window when run.
- Choose the correct robot from the first dropdown
- ActivityBot 360°
- ActivityBot
- ActivityBot 360° (Parallaxy)
- Choose the type of information to display
- results: option displays messages about whether your robot calibrated successfully, and if not, what might be wrong.
- data: displays the actual calibration values stored in EEPROM. These values may be useful if you are trying to troubleshoot a calibration problem with the help of Parallax tech support staff.
Load firmware

Currently, the Load firmware block is ONLY for use with the Parallaxy Telepresence Robot (#32800) . The code MUST be loaded to EEPROM. The block loads the Parallaxy firmware for interacting with a Raspberry Pi, which itself is programmed to work with LetsRobot.TV. For more information on Parallaxy software setup, see its letsrobot.readme.io pages here.