When an accelerometer is mounted on the Boe-Bot robot, it can be programmed to seek out hilltops or valleys. It can also be programmed to detect when the hill it's trying to climb is too ambitious and seek out another route. Instead of an autonomous roaming aid for the Boe-Bot, an accelerometer can be a useful tool in a tilt radio controller. The great thing about the Boe-Bot is that it can also be directed by a remote controller, but use the intelligence you program into it to decide whether or not to follow the instructions it's receiving.
How it Works
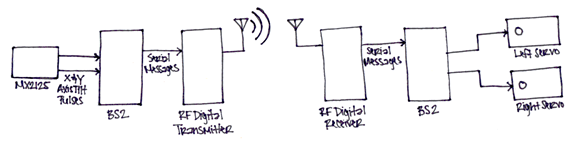
This activity uses a single serial RF channel to transmit the x-axis and y-axis tilt information from your handheld RF tilt controller to the Boe-Bot. The BASIC Stamp module in the RF tilt controller captures the tilt pulses from the MX2125, and stores them in its RAM. It then sends the serial version of these values to the transmitter in the RF Transceiver it's connected to, which in turn modulates and broadcasts the serial messages. If the receiver on the Boe-Bot’s RF Transceiver is in range, it receives and demodulates the message, and sends the reproduced serial message to the Boe-Bot's BASIC Stamp. When the BASIC Stamp gets the x-axis and y‑axis tilt measurements, it can then use them to make navigation decisions and send control pulses to its servos. The block diagram of this process is below in Figure 1:
Figure 1 - Block Diagram
Getting Started
This project contains advanced topics, not intended for Boe-Bot beginners. Before continuing, it is highly recommended you complete the following tasks in order to gain a better understanding on how this application works:
- Complete at minimum Chapters 1-4 in Robotics with the Boe-Bot (#28125).
- Download the Memsic 2125 Demo Kit Documentation and learn the accelerometer’s basics.
- Go through Chapter 3: The Memsic Dual-axis Accelerometer in Smart Sensors and Applications (pdf only). This will give you a better understanding on how the Memsic Dual-axis Accelerometer works.
- Optionally try Chapters 5 & 6 in Smart Sensors and Applications. These chapters contain cool projects such as programming video games, determining height using line-of-sight, and measuring acceleration while executing an Ollie on a skateboard. These activities are fun, and they will also help you better familiarize yourself with the Memsic Dual-axis Accelerometer.
- Try A Wireless Musical Keyboard to review the basics of RF communication.
- Try Boe-Bot Robot Navigation with Accelerometer Incline Sensing. The codes for these two activities are very similar, and it is a good idea to familiarize yourself with the coding techniques.
Parts List
(1) Fully assembled and tested Boe-Bot® Robot (#28132)
The parts below are included in the Boe-Bot Robot kit:
(1) Piezospeaker (#900-00001)
(4) 220 Ω Resistors (#150-02210)
(1) HomeWork Board with BASIC Stamp 2 (#28158)
The BASIC Stamp 2 Board of Education (#28103) or the RadioShack What's a Microcontroller BASIC Stamp Kit is also suitable for this activity
(1) Memsic 2125 Dual-axis Accelerometer (#28017)
(2) 433 MHz RF Transceivers (#27982)
Using wires instead of RF
So long as your wire harness is in the neighborhood of 3 ft (or 1 m), you can replace the transmitter/receiver/transceiver with 2 wires. The first wire has to connect the Vss terminals on both boards. The second wire connects the I/O pins that would otherwise be connected to the serial pins on the RF modules. Use a 220 Ω current limiting resistor in series with the wire, and a 10 kΩ pull-down resistor.
Source Code
Source code for Tilt Radio Controller