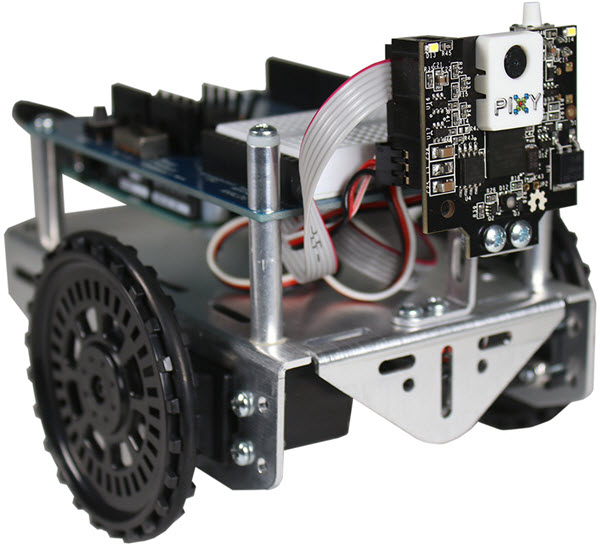
Attach the Pixy2 CMUcam
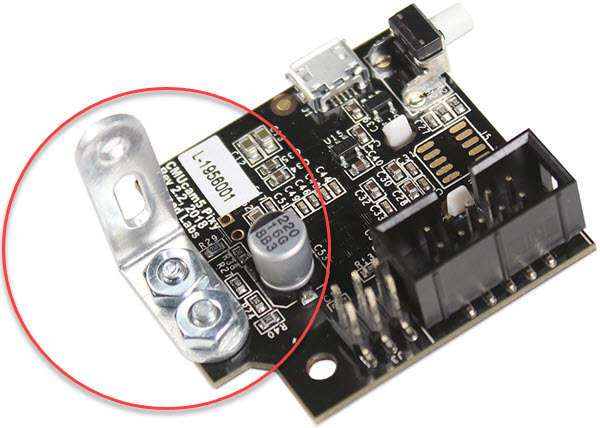
- Connect an ’L’ bracket to the Pixy2 board, using the two 14″ screws included in the camera box, and two nuts.
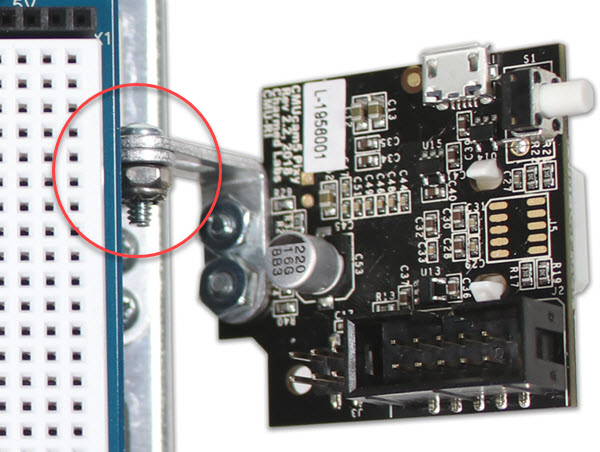
- Connect the two ’L’ brackets together, using the longer 3/8″ screw and Nylon-core locknut.
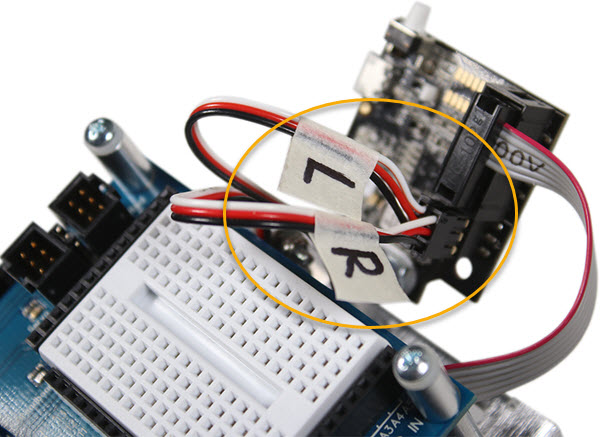
- Plug in the ribbon cable to the Pixy2 camera, and connect the servo cables, with the left servo cable closest to the center of the Pixy2 camera.
- Adjust the tilt of the Pixy2 camera up or down, depending on the needs of the application. If the camera tilts down on its own, tighten the screw and locknut connecting the ’L’ brackets.