Step 13 – Shaft Collar and Swivel Post

- Insert the stop collar between the two flange bearings and then slide the swivel rod assembly through the swivel block assembly. The stop collar has a built-in set screw.

- While holding both the flange bearings and the stop collar between the bearings, line up and slide the swivel rod through the swivel block assembly.
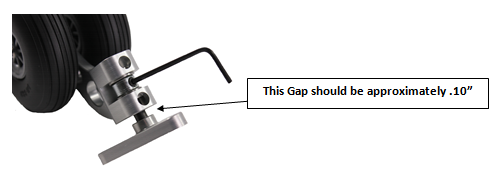
- Use the 3/32” hex key to tighten the set screw in the shaft collar as shown above.
The gap between the triangular plate and the to of the swivel block should be approximately on tenth of an inch. You can make fine adjustments after they’re mounted on the Arlo deck.

- Assemble the second caster assembly.
The six remaining #6×3/8”socket-head screws will be used in the next Section.