Step 3 – Drive Axle Pin
- Insert the drive pin into the axle.
This will require some “gentle, yet firm” taps from a small steel hammer. The drive pin should be centered side-to-side through the axle as shown. Be careful to not damage the (soft) aluminum axle.
Once the drive pin is installed, it is very difficult to remove. Double-check your work to be sure that you’ve done everything correctly up to this point.
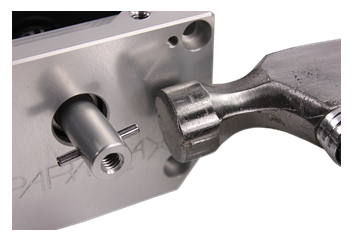
You may wish to use a small piece of wood to support the axle as you “tap” the pin through the axle (above). When you’re finished, the drive pin should be centered in the axle.