Step 30 – Light Pipe and Protector Stands
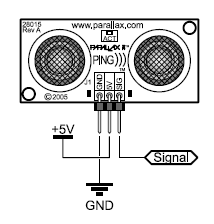
- First, you may wish to make a note of the PING))) sensor pin connections labeled on the front of the PCB now. They will not be visible once the sensor is installed into the stand.
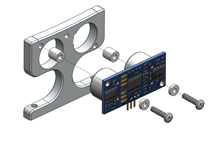
- Install the Ping))) sensor to the aluminum stands as shown, using (2) ¼”thick nylon spacers, (2) 1/2” screws, and (2) nylon flat washers.
- Place the Ping))) stand on a flat surface with the aluminum stand portion facing up.
- Put a tiny dab of glue on the light pipe near the slightly fatter end.
- Slide the light pipe into the hole on the front of the aluminum stand so that it just barely touches the Ping))). The light pipe will project a little from the front of the stand, but this is normal. It does not have to sit flush with the stand.
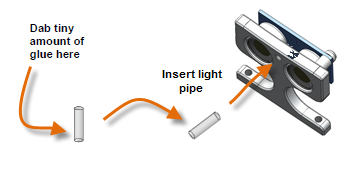
Important: Do not push the light pipe in further after you feel it touch the Ping))) – doing so could damage your Ping))) sensor!
Note: Some images and text from this assembly section were taken from the #725-28015 product guide.