Step 31 – Attach Ping)))s to Stands
- Once all four Ping))) Sensors are assembled, mount them with socket head screws to the Arlo main deck. Route the wires as shown.
Note: You can use a few zip ties to help keep them neatly in place like shown in the photo below, but you may need more zip ties for this than were provided in the kit. This is optional, but we do recommend having additional zip ties on hand for future Arlo modification.
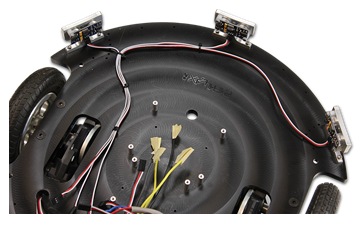
There are (4) Ping))) (three-wire) cables: 12″, 12”, 16” and 24”. The remaining (2) 4” cables will be used in Section 7. The Ping))) sensor directly in front of the right drive wheel uses the 24” 3-wire cable. The center-front sensor cable is 16” in length, and the left-front sensor uses one of the 12” cables. The rear-facing sensor uses the other 12” cable.
- Plug a 3-wire cable into each of the Ping))) sensor assemblies. Be sure that the black (ground) wire is on the left-hand side of the sensor, when viewed from the front of the sensor.