Step 33 – DHB-10 and Control Board
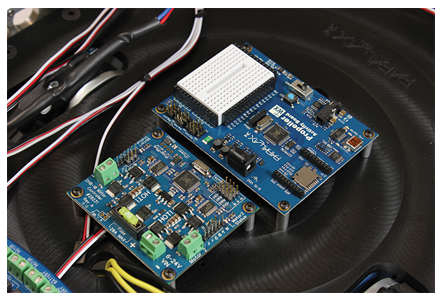
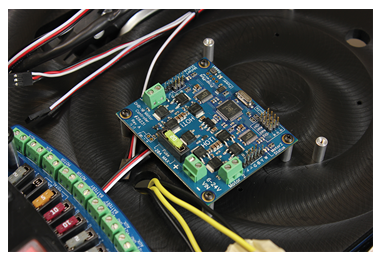
- Attach the DHB-10 Motor Controller onto the narrower set of (4) standoffs (installed in Section 3) using (4) #4-40 x ¼” Phillips head screws. The image below shows its appropriate orientation.
- Now, install the Propeller Activity Board WX (or Board of Education, or BOE Shield for Arduino if applicable) onto the wider set of (4) standoffs (also installed in Section 3). The image below shows its appropriate orientation – note that the 3-pin ports adjacent to the white breadboard are close to the DHB-10. Remember that if you are using a BOE Shield for Arduino you must have installed 1.25″ standoffs to allow enough clearance to mount the board.