Step 7 – Encoder Assemblies
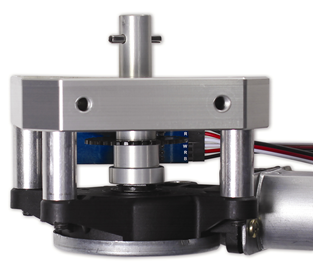
The encoder board has a very tiny slotted sensor that must have the encoder wheel (that has already been installed on the drive axle) centered within its slot.
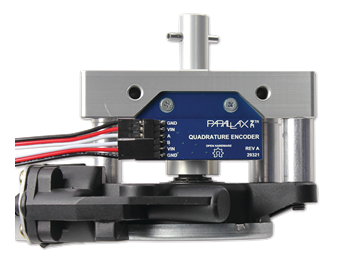
- Carefully secure the encoder assemblies into the milled cavities using the two flat-head Phillips screws provided in the encoder package (these are very tiny screws).
You should position the encoder boards over the encoder discs such that the discs fit in the center of the slot on the encoder sensor. The Encoder Disc should be slid tight to the axle’s “shelf” (the slightly larger diameter of the axle), as shown below.
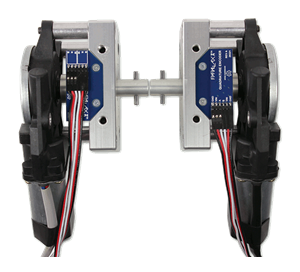
This completes the assembly of a single motor drive unit. Duplicate what you just did for the other motor drive unit, and when you’re finished the result will be two separate motor drive units that are mirror images of each other (below)—one for each side of your robot platform. Please note that the image shown below does not show the motor units in their actual mounted configuration.