Connect Your BOE to the DHB-10
Connect Your BOE to the DHB-10
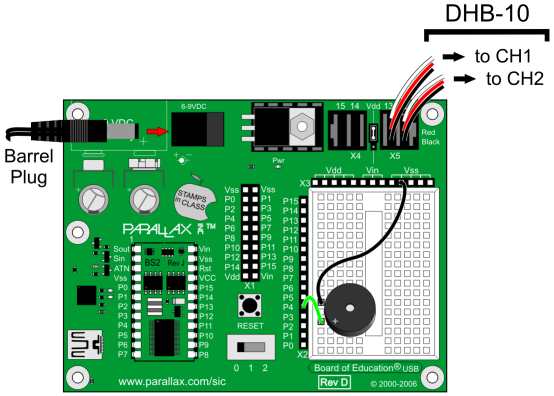
The BOE connections to the Arlo’s DHB-10 motor control board use the same servo ports as the ones you used to connect to your Boe-Bot’s servos.

- Complete the Arlo Robot Assembly Guide first (IMPORTANT).
- Turn off the Arlo’s MAIN and MOTOR power switches.
- Set the BOE’s 3-position power switch to 0.
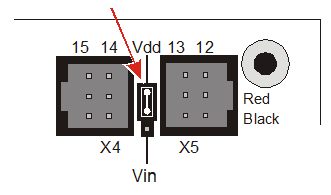
- IMPORTANT! Make sure the jumper between servo headers P14 and P13 is set to Vdd, NOT Vin. (See image, below.)
- Use a 4-inch 3-wire cable to connect the P13 servo to the DHB-10’s CH1 port.
- Use another 4-inch 3-wire cable to connect the P12 servo to the DHB-10’s CH2 port.
- Double-check that the 3-wire cables are oriented properly, with the black wires connecting to the pins labeled BLACK.
- Connect the Arlo’s +6.5 V Aux barrel plug to the BOE’s barrel jack.