Connect Activity Board to DHB-10
Connect Activity Board to DHB-10
The ActivityBot connections to the Arlo’s DHB-10 motor control board use the same servo ports as the ones you used for your ActivityBot’s servos. The encoders are connected to the DHB-10 board, so you won’t need to connect encoders to the P14 and P15 ports, so they’ll be available for connecting to other devices.
NOTE: The 20k resistors are not needed when connecting your Activity Board to the Arlo. You should not have resistors in P14/P15; if they are in your breadboard, remove them and continue with this tutorial.
- Turn off the Arlo’s MAIN and MOTOR power switches.
- Set the Activity Board’s 3-position power switch to 0.
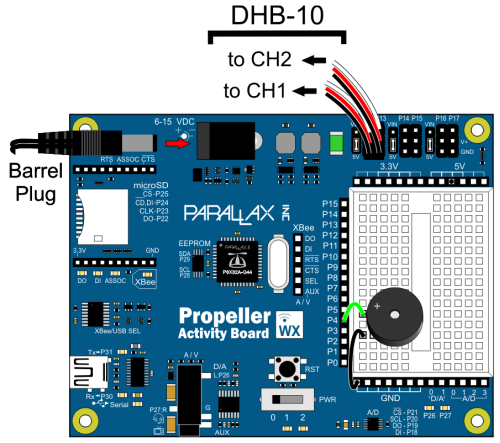
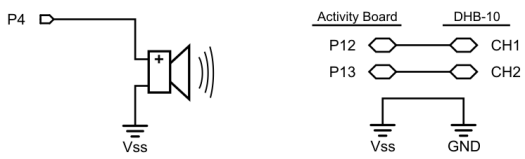
- Use a 4-inch, 3-wire cable to connect the Activity Board’s P12 servo port to the DHB-10’s CH1 port.
- Use another 4-inch, 3-wire cable to connect the Activity Board’s P13 servo port to the DHB-10’s CH2 port.
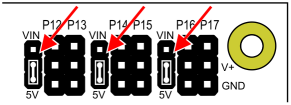
- IMPORTANT! Make sure the jumpers between servo headers are set to 5V, NOT Vin. (See image, below.)
- Connect the Arlo’s +6.5 V Aux barrel plug to the Activity Board’s barrel jack.