Step 3 – Prepare Servos
Prepare the Servos for Mounting
- Using the screwdriver that came with the kit, carefully remove the black screw from the center of each servo horn.
- SAVE THE SCREWS! You will need them again later.
- Pull each servo horn straight up and off of its servo spline, and set the horns aside.

Note Right and Left Servo Positions
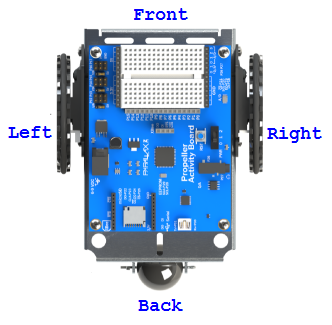
In the next few steps you will mount the right and left servos on the chassis. But which side is right and which side is left?
- Note that the front of the robot chassis has three slots on top.
- Note that the back of the chassis has an arch for the tail wheel ball.