Step 6 – Mount Left Servo
Mounting the Left Servo in the Chassis
For all ActivityBot robots, but read carefully. Directions are slightly different for robots with external encoders.
Parts needed for this step:
- (1) Parallax mini combo wrench (#700-10025)
- (1) Parallax screwdriver (#700-00004)
- (2) #4-40 nylon core lock-nuts (#700-00024)
- (2) 3/8-inch pan-head steel screws (#700-00028
- (1) Servo with horn removed; High-Speed (#900-00025) or Feedback 360° (#900-00360)
- Position the left servo inside its chassis mounting hole so the spline is towards the middle of the robot and the servo cord is next to the grommet.
- Find the two servo mounting holes that are closer to the outer edge of the chassis.
- Using two 1/2 inch metal pan-head screws and two lock-nuts, attach the servo to the outer-edge mounting holes.
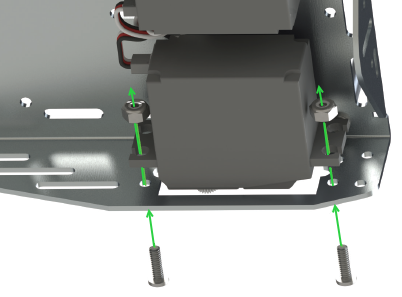
- Tighten securely.
STOP! READ!
- If your ActivityBot Robot Kit has external encoders, go to Step 7 – Mount Right Encoder.
- If your ActivityBot Robot has Feedback 360° servos, keep going here.
Parts needed to complete:
- (2) #4-40 Nylon core lock-nuts (#700-00024)
- (2) 3/8-inch pan-head steel screws (#700-00028
- Use two more screws and lock-nuts to finish mounting the left servo — four screws in all.
- Then, skip Steps 7 & 8 and go straight to Step 9 – Mount Battery Pack.