Build a Beeper Circuit
Building Circuits on a Breadboard
The white grid on the Board of Education is called a “breadboard.” You will use this board to plug in little wires and electronic components to build circuits. How does a breadboard work, and why is it called a breadboard, anyway?
- Watch this video to find out!
]
In a moment, you will get to build a circuit on your Boe-Bot’s breadboard. Circuits are described with line drawings called “schematics.” This video shows you how to look at a schematic and build that circuit on a breadboard.
]
Build a Beeper on your Boe-Bot
Ok, now it’s your turn. This is about as simple a hardware circuit as we can get.
On the left is the schematic symbol for a small “beeper” – a device that will emit a tone when given a series of pulses from an electronic circuit. The right image is what the beeper physically looks like.
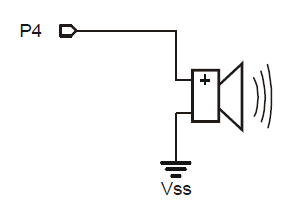
This is the schematic diagram of the circuit that we’re going to build. It shows the inter-connections of the circuit components. In this case, the “+” side of the beeper is connected to a signal line called “P4” (whose connection is available alongside the breadboard area of the Board of Education)
This is a pictorial diagram of what your completed circuit should look like when you’re done…
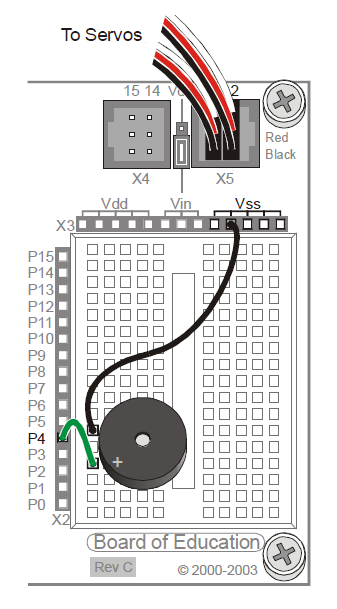
- Build the piezo speaker circuit on your robot’s breadboard.
This completes the “hardware” portion of this circuit. However, for anything to happen, we need to introduce some “intelligence” (a program) to cause it to do something…
- Launch the BASIC Stamp Editor and type in the following program: You can click on the “BS2 Directive” which inserts the first line automatically, or you can type it in as shown…
' {$STAMP BS2}
x VAR Byte
FOR x = 0 TO 20
HIGH 4
LOW 4
NEXT
STOP
- Click the Run “>” button. You should hear a short “beep”.
- Try changing the “20” to “255” – what happens? How about other values between 0 and 255?
- Can you explain what the program is doing to the beeper?
- Write your observations (in your Engineering Notebook) on what the software (your code) is doing to the hardware (the beeper).