Adjusting Flight Characteristics
Adjusting Flight Characteristics
There are several advanced settings within the Radio Setup tab of the Parallax GroundStation that can be used to tune the flight characteristics of your ELEV-8 v3 quadcopter. These settings are specific to the mode your ELEV-8 v3 is in, so it is important to understand what each setting is and how it works.
- Connect your ELEV-8 v3 to your computer, open the GroundStation, and make sure that your ELEV-8 v3 is shown as connected.
- Click on the “Radio Setup” tab in the GroundStation.

On the bottom half of the GroundStation window, you will see six different adjustments that can be made:
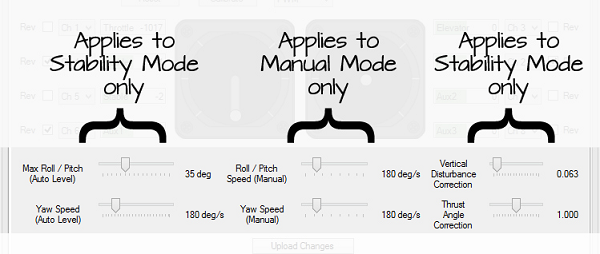
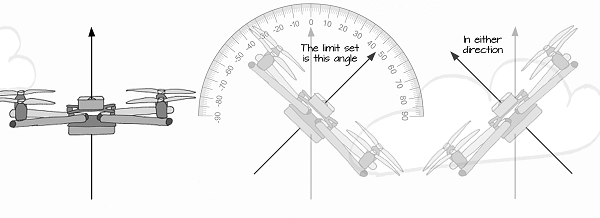
Maximum Roll/Pitch (Stability mode only)
Stability Mode limits how far the ELEV-8 v3 or multirotor will Roll or Pitch in flight. The default limit is 30 in any direction.
To change the Maximum Roll/Pitch:
- Use your cursor to adjust the Max Roll/Pitch slider (The default Max Roll/Pitch value is 30 degrees).
- Click the “Upload Changes” button to save your new settings.
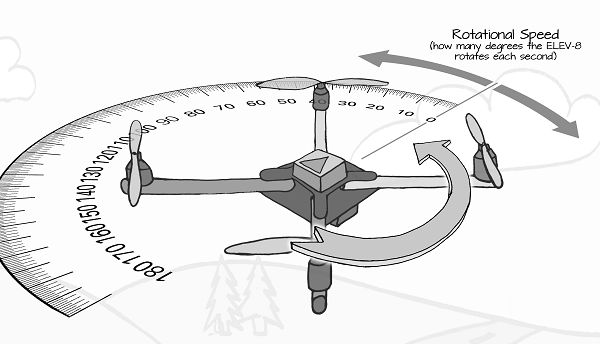
Yaw Speed (Separate settings for each mode)
To change the Yaw Speed settings:
- Use your cursor to adjust the Yaw Speed (Auto Level) slider (The default Yaw Speed (Auto-Level) value is 180 degrees/second).
- Use your cursor to adjust the Yaw Speed (Maunal) slider (The default Yaw Speed (Maunal) value is 180 degrees/second).
- Click the “Upload Changes” button to save your new settings.
Roll/Pitch Speed (Manual mode only)
To change the Roll/Pitch Speed:
- Use your cursor to adjust the Roll/Pitch Speed slider (The default value is 180 degrees/second).
- Click the “Upload Changes” button to save your new settings.
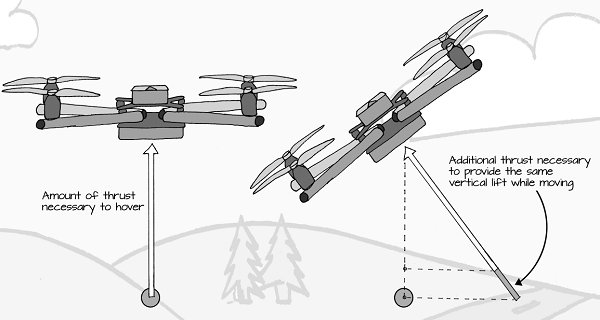
Vertical Disturbance Correction (Stability Mode only)
To change the Vertical Disturbance Correction:
- Use your cursor to adjust the Vertical Disturbance Correction slider (the default value is 0.063).
- Click the “Upload Changes” button to save your new settings.
Thrust Angle Correction (Stability Mode only)
- Use your cursor to adjust the Thrust Angle Correction slider (the default value is 1.000).
- Click the “Upload Changes” button to save your new settings.