Get Ready to Build
Building and controlling circuits with the cyber:bot board is a great way to learn about electricity, and to experiment with making your own inventions. Building experimental circuits to design your own projects is called prototyping, and it is a real-world engineering skill.
Before you start your cyber:bot prototyping, there are three important Reference pages you should have handy, especially if you have never built circuits on a breadboard before. Just click on each link and the page will open in a new tab or window.
- Open the Breadboard Basics page, and watch the video if you can.
- Open the Schematic Symbols page, and look up the symbols for resistor, light-emitting diode, pushbutton, and microcontroller input and output pins.
- Open the Resistor Color Codes page (we’ll use it soon).
- Now, keep reading below to learn about the breadboard on the cyber:bot.
The Breadboard on the cyber:bot
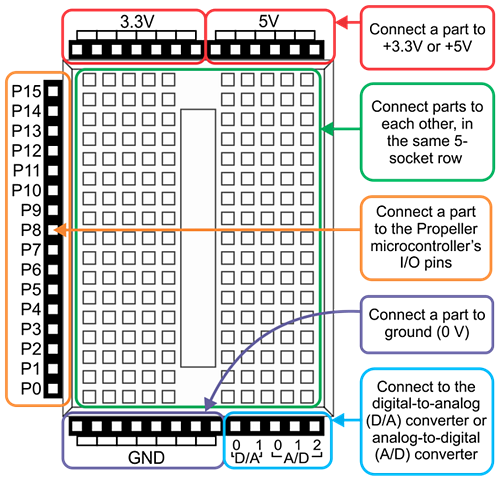
The cyber:bot Board has a solderless breadboard mounted on it. The breadboard lets you connect common electronic components together to build your own circuits.
The cyber:bot’s breadboard is surrounded on three sides by black sockets. These make it convenient to connect circuits on the breadboard to power, ground, and the Propeller I/O pins. There are also sockets to connect to a digital-to-analog converter signal from the Propeller chip, and to an analog-to-digital converter on the micro:bit.
Remember the 3-Position Switch Guidelines!
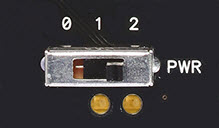
Before you build circuits on the breadboard, let’s review:
- Position 0: ALWAYS use 0 for building or modifying circuits; also good for flashing scripts. Position 0 turns off power to the whole cyber:bot board. If the micro:bit is plugged into USB, you can still flash and run non-robot scripts.
- Position 1: Good for flashing scripts and powering breadboard circuits. Position 1 powers the Propeller system and sockets along the breadboard, but not the 3-pin/Servo ports, so your cyber:bot won’t roll away the moment you program it. Position 1 also powers the micro:bit independent of its USB port.
- Position 2: ONLY use 2 when you are ready for your robot to move. NOT good for flashing scripts. Position 2 powers all the circuits on the board, including the 3-pin servo ports, and also the micro:bit independent of its USB port.