Drive your cyber:bot with the Remote
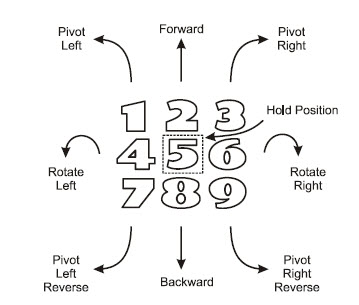
With the next program, use buttons 1-9 to drive the robot in different directions. Once you press a button, your robot will drive in that direction until you choose another direction. Press 5 to make it stop.
- Change the project’s name from ir_remote_test to ir_remote_control.
- Enter the script below, and then click Save.
- Click Send to micro:bit.
- Unplug the USB cable from the cyber:bot.
- Set the cyber:bot on the floor, and set the cyber:bot board’s PWR switch to 2.
- Point the remote at the IR receiver on the board, and press numbers on the remote to make it drive. Press 5 to make it stop.
# ir_remote_control
from cyberbot import *
from tv_remote import *
wL = 0
wR = 0
img = Image.HAPPY
bot(22).tone(2000, 300)
while True:
num = ir(10).remote()
if num == 1:
wL = 0
wR = -75
img = Image.ARROW_SE
elif num == 2:
wL = 75
wR = -75
img = Image.ARROW_S
elif num == 3:
wL=75
wR=0
img=Image.ARROW_SW
elif num == 4:
wL=-75
wR=-75
img=Image.ARROW_E
elif num == 5:
wL=0
wR=0
img=Image.HAPPY
elif num == 6:
wL=75
wR=75
img=Image.ARROW_W
elif num == 7:
wL=0
wR=75
img=Image.ARROW_NE
elif num == 8:
wL=-75
wR=75
img=Image.ARROW_N
elif num == 9:
wL=-75
wR=0
img=Image.ARROW_NW
display.show(img)
bot(18).servo_speed(wL)
bot(19).servo_speed(wR)