Drive your cyber:bot with the Remote
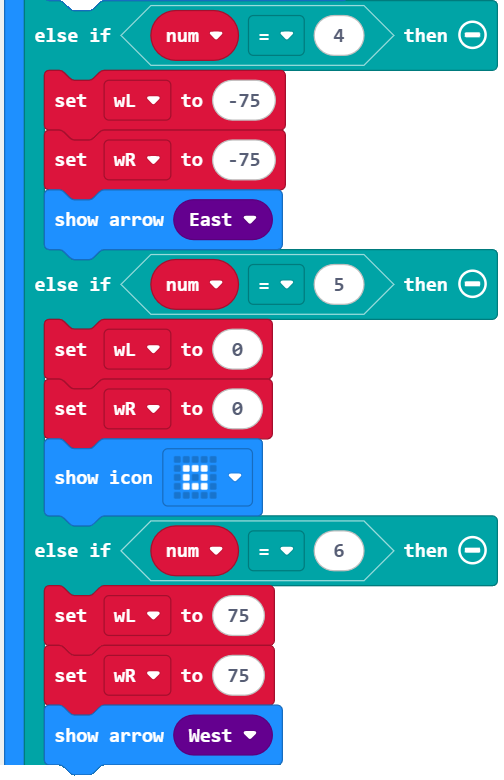
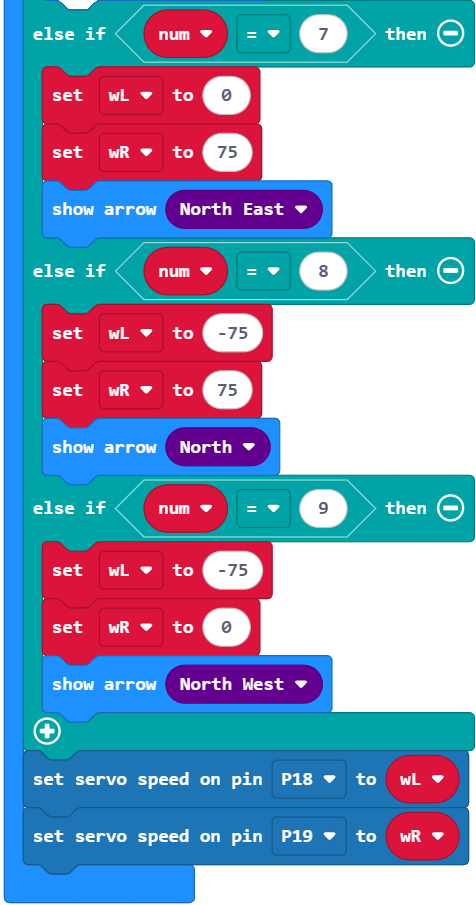
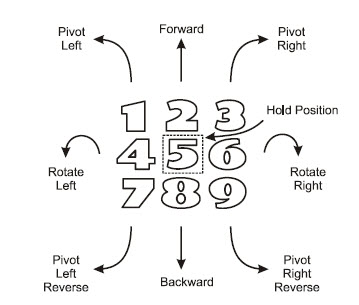
With the next program, use buttons 1-9 to drive the robot in different directions. Once you press a button, your robot will drive in that direction until you choose another direction. Press 5 to make it stop.
- Change the project’s name from ir_remote_test to ir_remote_control.
- Enter the project below.
- Click Download.
- Unplug the USB cable from the cyber:bot.
- Set the cyber:bot on the floor, and set the cyber:bot board’s PWR switch to 2.
- Point the remote at the IR receiver on the board, and press numbers on the remote to make it drive. Press 5 to make it stop.