Identify Your Hardware
This handout will guide you through selecting the handouts depending on what’s in your cyber:bot Robot Kit. To do this, you’ll have to answer three questions:
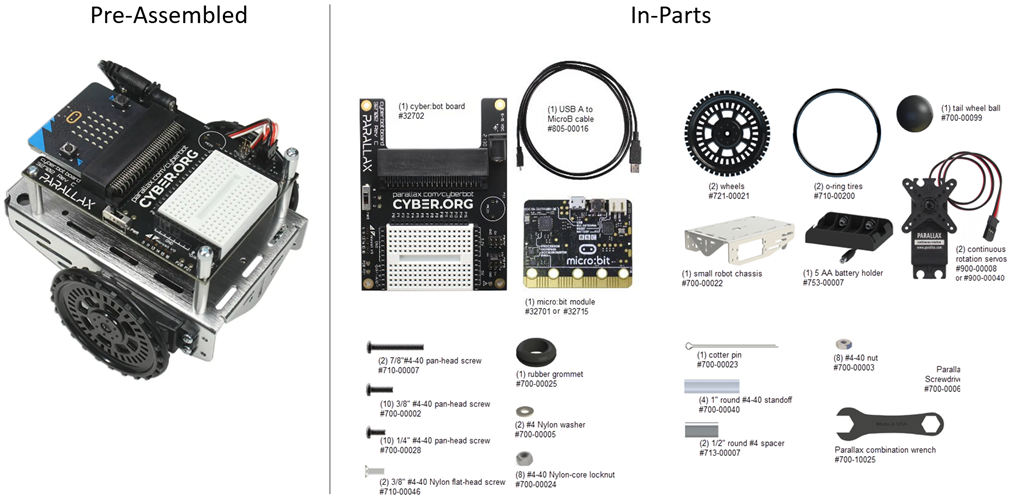
- Is the cyber:bot pre-build or in parts?
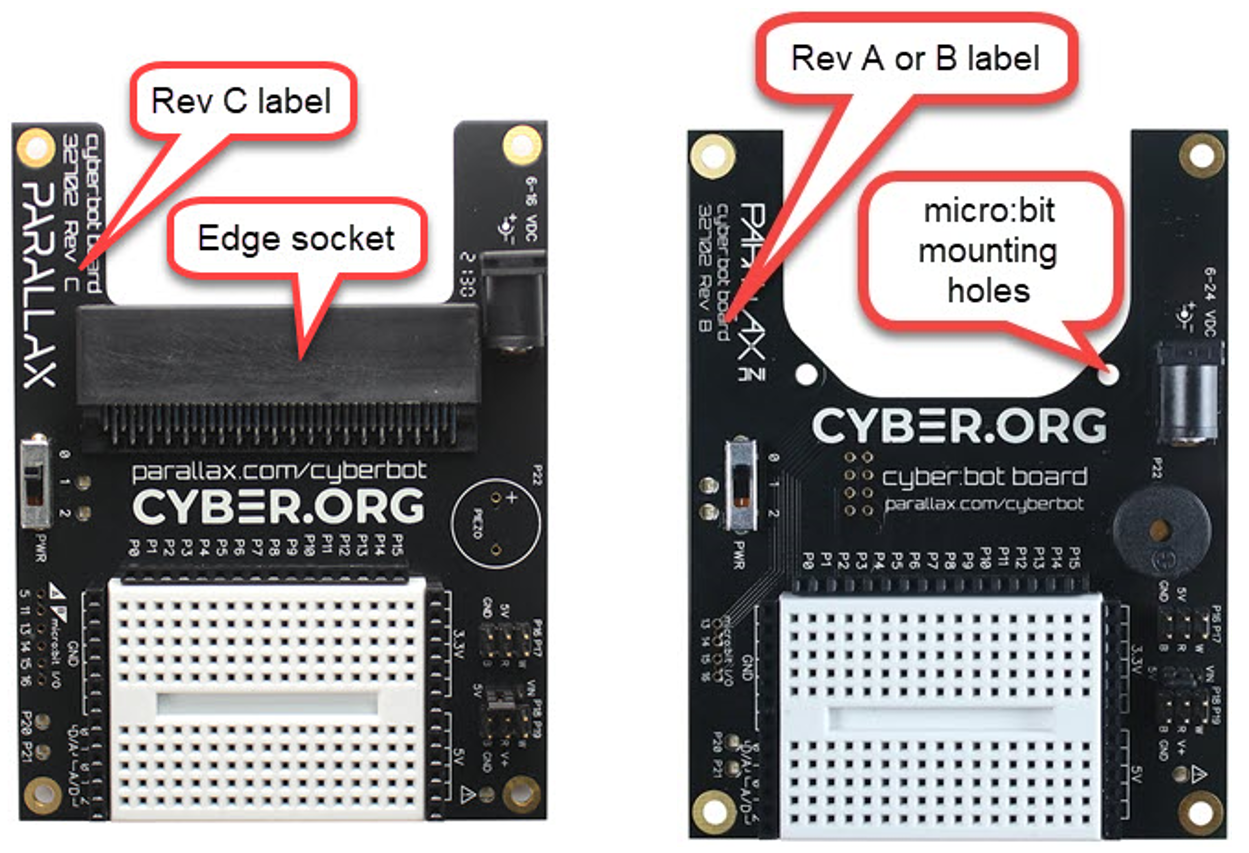
- Is the cyber:bot Board Rev C, or Rev A/B
- Are the Servos Factory Centered or Center-Adjustable?
Is the cyber:bot pre-assembled or in parts?
Is the cyber:bot Board Rev C, or Rev A/B
Are the Servos Factory Centered or Center-Adjustable?
The servo motors (servos) in the pictures below are the motors that will have robot wheels mounted on them, and they will make your cyber:bot robot move.
IMPORTANT: Do not discard any of the screws or parts that come with your servos.
Find the Servo Motors
They will either be in under the pre-assembled cyber:bot, or in the cyber:bot kit.
Identify Your Servos
- Examine the servo’s black case near where the white/red/black starts.
- If it has a small hole for adjusting with a Phillip’s screwdriver, it is called “adjustable”. This hole and the Phillip’s adjustment screw inside is called the center adjustment port.
- If it has a Factory Centered sticker, it is called “factory centered”.

- Make a note of whether your servos are adjustable or factory centered.
What’s Next?
Is your cyber:bot in parts?
- cyber:bot Board Rev C: Connect and Test
- cyber:bot Board Rev A/B: Connect and Test
Is your cyber:bot preassembled?
- cyber:bot Testing