Your Turn: Exception Handling
As mentioned in the previous Did You Know section, sometimes a catchall exception handler is okay for prototyping.
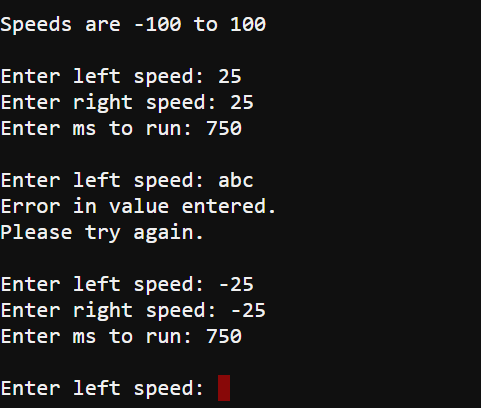
Here is an example where a typing error is likely when entering numbers. All the exception handler needs to do is tell you there was a mistake and then allow the while(True) loop to repeat.
- Use the micro:bit Python Editor to open terminal_controlled_bot_tethered_try_this.
- Set the project name to terminal_controlled_bot_tethered _your_turn.
- Click Save, and then click Send to micro:bit.
Example script: terminal_controlled_bot_tethered_your_turn
# terminal_controlled_bot_tethered_your_turn
from cyberbot import *
sleep(1000)
print("\nSpeeds are -100 to 100\n")
while(True):
try:
vL = int(input("Enter left speed: "))
vR = int(input("Enter right speed: "))
ms = int(input("Enter ms to run: "))
bot(18).servo_speed(vL)
bot(19).servo_speed(-vR)
sleep(ms)
bot(18).servo_speed(None)
bot(19).servo_speed(None)
print()
except:
print("Error in value entered.")
print("Please try again. \n")
- Open the serial monitor and click inside it..
- Try typing some valid number values, then type something invalid, like abc.
- Verify that the exception does not stop the app, and that it simply displays a message to try again.