Measure Accelerometer Tilt
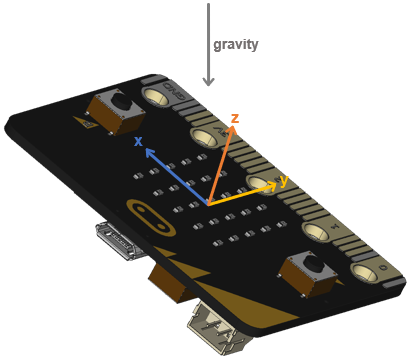
The micro:bit module’s accelerometer has three sensing axes: x, y, and z. You can picture the x-axis running side-to-side, the y-axis running front-to-back, and the z-axis pointing upwards.
When the micro:bit is held still, the accelerometer can sense how much each of these axes aligns with the downward pull of gravity. This can, in turn, be used to sense how you have tilted the micro:bit. In this activity, you will explore how the various numbers the micro:bit reports for its x and y accelerometer axes relate to its tilt direction and level.