Rapid Radio-Transmit Tilt Data
To make the tilt controlled robot responsive, it’s important to speed up the forever loop’s repeat rate. The changes are simple, just remove serial write statements and reduce pause (500) to pause (50). This will help prevent delays between tilting the controller and the cyber:bot’s response. Without the serial write statements, plan to use the LED displays to verify radio communication between the tilt controller and the cyber:bot.
Example project: radio_tilt_transmit_rapid
- If you are in a classroom, adjust the radio set group in the project to your assigned channel.
- Enter and flash radio_tilt_transmit_rapid into the micro:bit that you will use to measure and transmit tilt data.
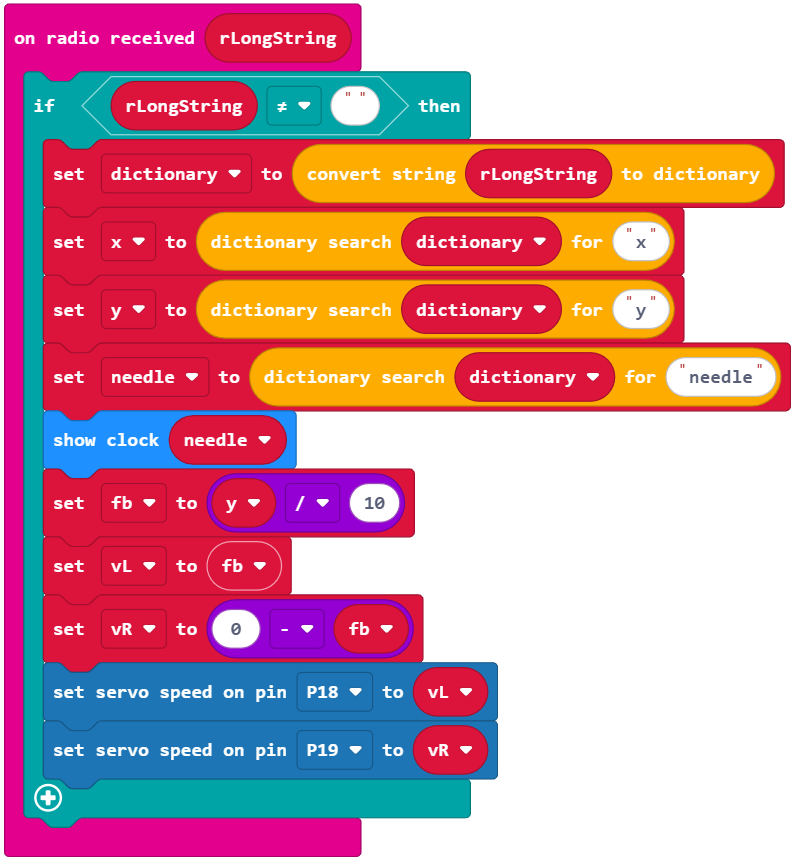
- Verify that the tilt direction needle still displays.
How radio_tilt_transmit_rapid Works
The radio_tilt_transmit_rapid project is almost identical to radio_tilt_transmit_test from the previous activity. The only differences are that the serial write statements were removed and the pause (500) at the end of the loop was changed to pause (50) to make it more responsive.
Why not just completely remove the pause call? Probably the most important reason is to not flood the airwaves with unnecessary radio activity. The pause (50) call reduces the radio transmissions to around 20 times per second. The difference between letting the micro:bit transmit as fast as it can and repeating with a 50 ms pause will not be noticeable as you tilt the micro:bit to make the cyber:bot move.