Update the Receiver cyber:bot project
The transmitter micro:bit should still be running the same project from the previous activity. That’s radio_tilt_controller_w_stop_range.
Now for the new cyber:bot receiver project!
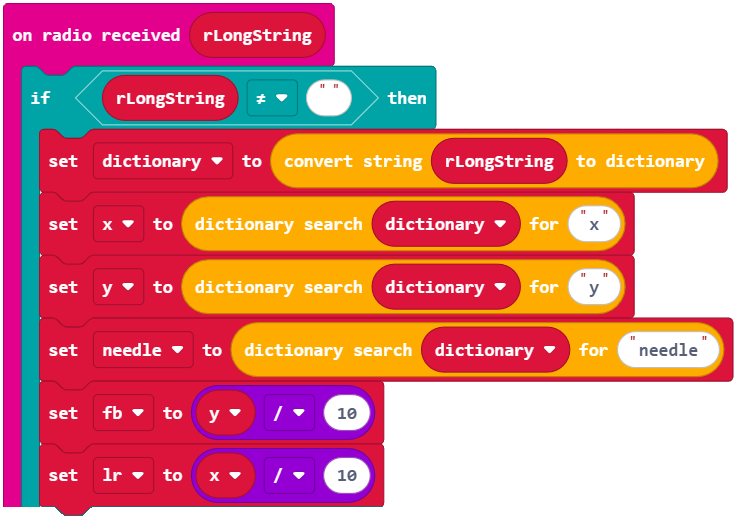
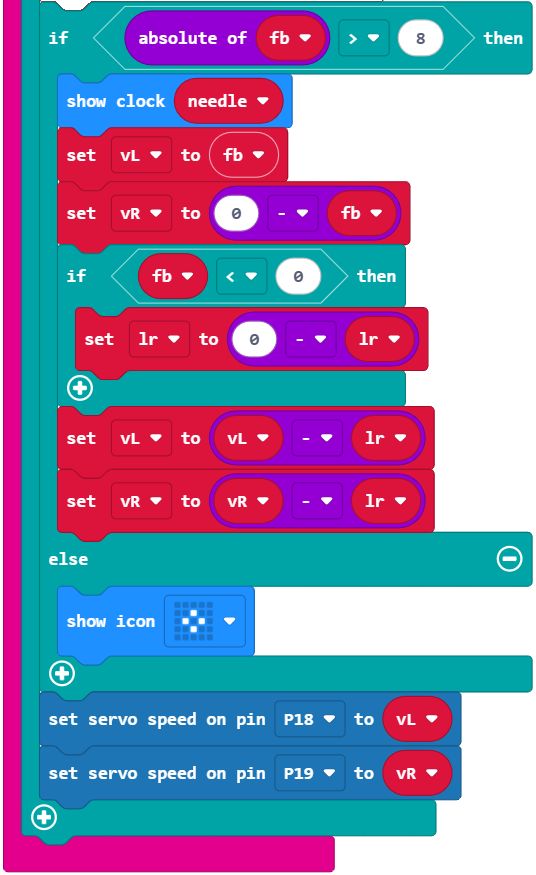
Example project: radio_tilt_bot_fb_lr_with_stop_range
- Set the receiver cyber:bot board PWR switch to 1.
- If you are in a classroom, adjust the radio set group in the project to your assigned channel.
- Enter and flash radio_tilt_bot_fb_lr_with_stop_range into the micro:bit that’s in the receiver cyber:bot.

- Set the cyber:bot board PWR switch to 1.
- Repeat the needle/diamond display tests from the previous activity.
- Set the cyber:bot board PWR switch to 2.
- Now, tilt the micro:bit transmitter in the directions shown in the table, and verify that the cyber:bot moves as expected:
| Tilt the micro:bit transmitter |
Verify the cyber:bot maneuver |
| Level | Stay still |
| Slightly away from you | Forward slowly |
| Further away from you | Forward faster |
| Slightly toward you | Slowly backward |
| Further toward you | Faster backward |
| Away from you and to the left | Curve forward and to the left |
| Away from you and to the right | Curve forward and to the right |
| Toward you and to the left | Curve backward and to the left |
| Toward you and to the right | Curve backward and to the right |