Attach Hinge to Chassis
Put the safety glasses on immediately! The Gripper has small parts, including a torsion spring which may be inadvertently released during assembly.
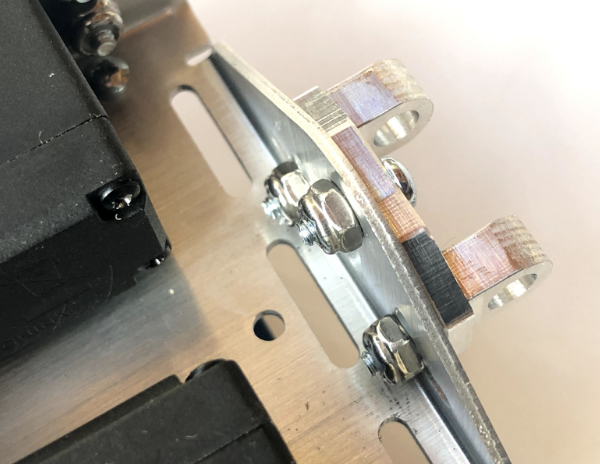
- Using (3) 4-40 ⅜” panhead screws, attach the Hinge to the front of the robot chassis by placing the screws through the holes and into the chassis. The Hinge part will mostly self-align in the correct position on the front of the robot chassis.
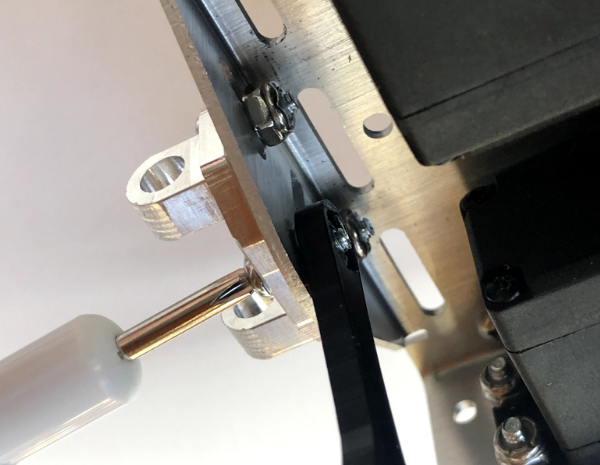
- Secure the screws with (3) Nylon locknuts on the inside of the chassis. The small wrench can help hold the nuts in place to get them started, but they should be tightened securely with needle-nose pliers.
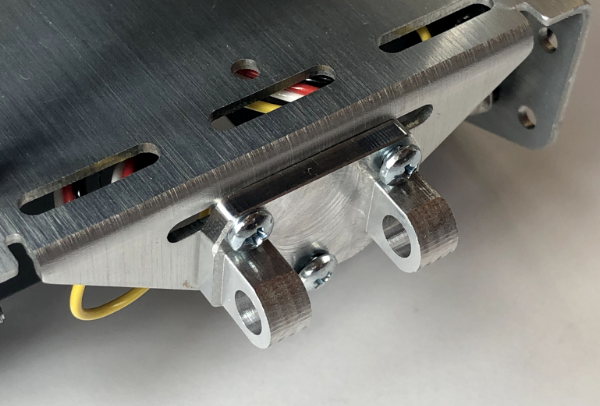
- The mounted Base should look like this when viewed from the bottom of the robot.