Tuning and Programming
Physically Position the Servo and Gripper
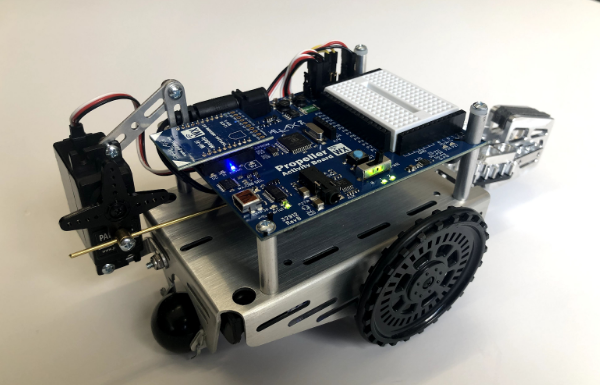
Prior to doing any programming to open and close the gripper, the servo horn should be centered within the servo’s range of motion – in the middle with 90 degrees of motion on either side – and the Gripper in the closed, lower position as shown below.
- Loosen the screw on the brass connector to allow the brass rod to position itself correctly.
- Move the servo through its range of motion and make sure it is centered when the Gripper is closed and in the lowered position.
- If needed, remove the servo screw and rotate the servo horn to an optimal position, then re-attach.
- Tighten the screw on the brass rod connector when you are done.
Coding for the Gripper
Parallax hosts many tutorials for controlling a standard servo. Regardless of the microcontroller you are using, the following is always true for the Parallax Standard Servo which rotates 180°when mounted on the Gripper:
- A positive pulse of 1500 us between a 20-40 ms pause will put the servo in the center position;
- 0° is a 1000 μs (1 ms) pulse and 180° is a pulse of 2000 us (2 ms), with the pause mentioned above;
- Program the microcontroller to “step” through the full range of motion and avoid “Gripper slapping” by finding the best increments of pulse stepping to move the Gripper; and
- A range of motion of less than 90 degrees of movement is plenty to control the Gripper.
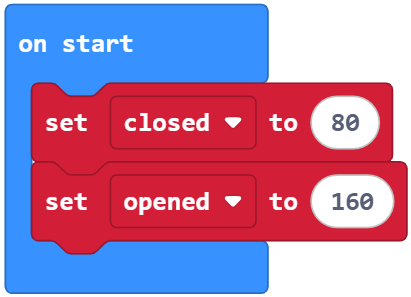
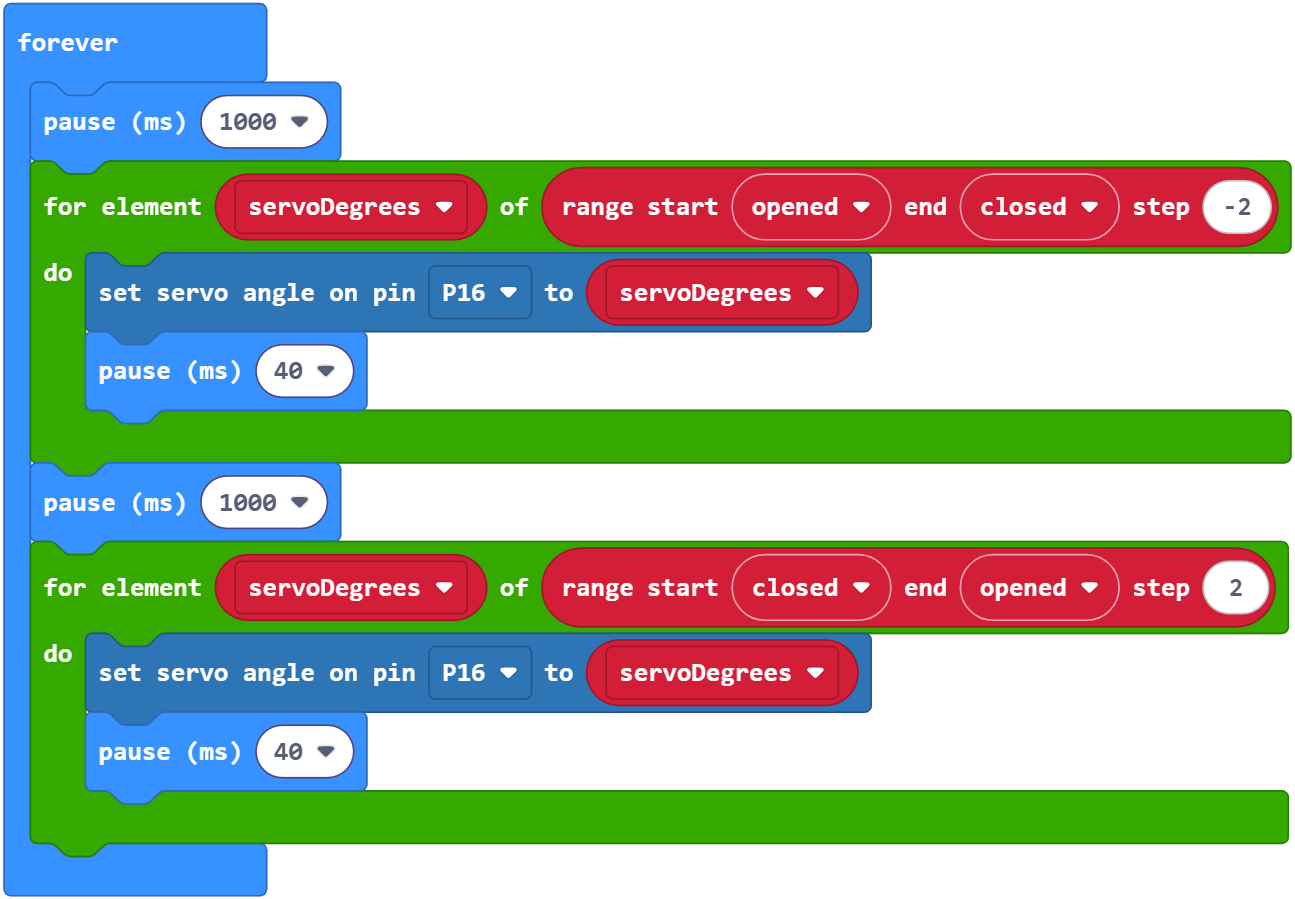
Below is a sample project in Makecode to test your gripper out.