Beginning Flight Practice
Beginner (Low-Risk) Flight Practice
Before you go out and fly your full-size multirotor, it would be prudent to spend some time practicing operating RC multirotors in a low-risk fashion, where dozens of crashes won’t stretch your wallet thin.
There are two main ways to practice flying:
- We strongly recommend you purchase a BNF (bind-‘n-fly) Mini Quadcopter. BNF will allow you to use your transmitter (the same one you will use for the ELEV-8). These inexpensive and nearly indestructible models are designed for indoor flight and are a great way to learn how to fly using your particular transmitter without worrying about damage from crashing.
- Flight Simulators are another potential option for learning how to fly RC model aircraft. They are usually computer programs that come with an adapter that allow you to connect your transmitter to your computer.
First Full-Scale Flights
Once you are comfortable with your flying abilities, you can at last begin flying your full-size multirotor! What follows is some general advice on how to successfully approach your first few flights. The first thing any new operator must learn is throttle control. Below are some steps we recommend following to help you get a handle on the matter. (Don’t forget about all of the guidelines, warnings, and precautions!). Keep in mind that learning this will take dozens of flights. It is not something you can learn in a day, or even a week, and complete mastery will take many months of dedicated practice.
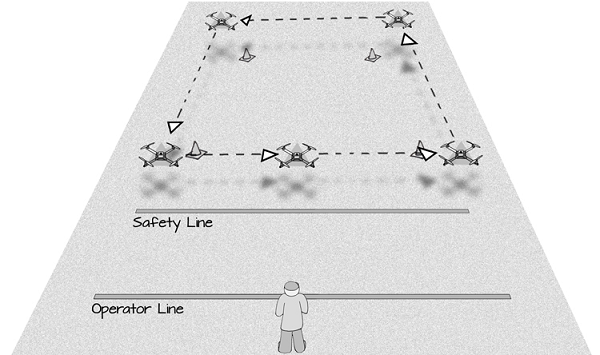
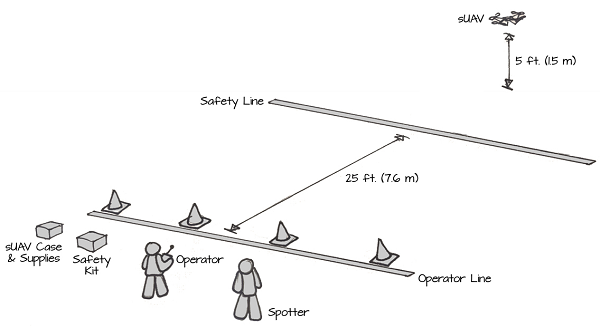
Place the multirotor on the ground facing away from you in a wide open area. Plug in the battery. Step back at least 25 ft. You and your spotter should be wearing safety eyewear:
After arming the flight controller, slowly and carefully increase the throttle until the multirotor begins to lift off. For most multirotors, it takes approximately 50% throttle to take off. As soon as your multirotor leaves the ground, gently ease off and begin to decrease the throttle and land.