Steering an Aircraft
Steering an Aircraft
An RF transmitter (shown below) works by sending signals to a receiver on the aircraft. There are at least 5 channels (separate signals) that get sent to the aircraft, one for each control: Throttle, Rudder, Elevator, Aileron, and Gear.
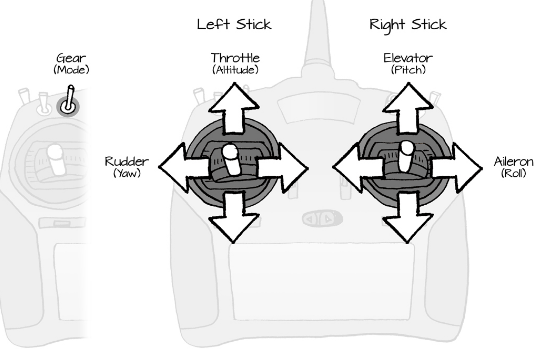
The transmitter shown is a Mode 2 transmitter. This means that the Throttle/Rudder stick is on the Left, and the Elevator/Aileron stick is on the right. Mode 1 transmitters have the sticks switched, and are much less common. All Parallax guides and literature assumes the use of a Mode 2 transmitter.
These names come from the control surfaces of fixed-wing aircraft (airplanes). These surfaces are flaps that can be moved to redirect the air around them, which changes the direction an airplane flies.
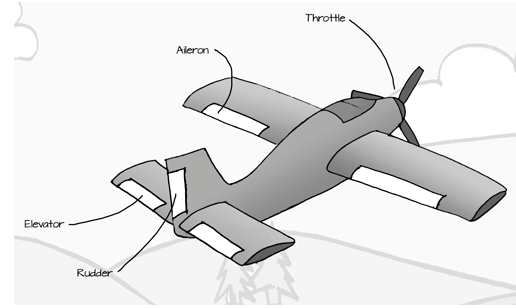
Although a multirotor sUAV does not have flaps, it is able to simulate the effect of control surfaces by controlling the speed of each of its motors individually. So, the same transmitter 5 channels, with the same names, are also used when flying an sUAV. Let’s look at each channel – one at a time – in the next section.