Understanding Each Control Channel
Understanding Each Control Channel
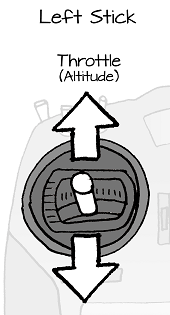
Throttle (Altitude)
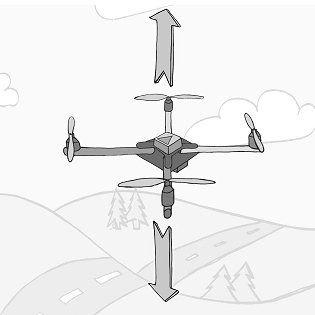
The throttle stick starts in the downward or “zero throttle” position. The throttle is controlled by moving the left stick up and down. On a multirotor, the throttle controls the speed of all of the motors equally, generating lift and moving the multirotor up.
The multirotor moves in an upward direction when the throttle is increased moving the stick upward. If the throttle is decreased by moving the stick downward, the multirotor generates less lift, and will begin to descend because of gravity.
Every multirotor has a neutral throttle position. This is an approximately centered position where the overall force of lift pulling the multirotor upward is the same as the force of gravity pulling the multirotor downward. This causes the multirotor to hover or stay at the same height in the air.
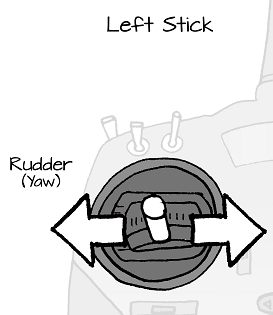
Rudder (Yaw)
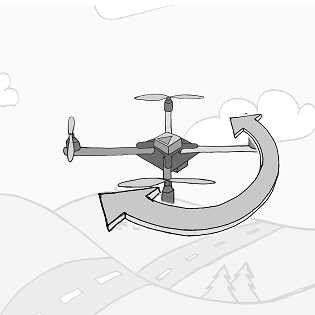
The Rudder is controlled by moving the left stick horizontally (left and right), and it contains a spring that returns the stick to the center when it is not being pushed left or right. Controlling the Rudder causes the multirotor to Yaw. Yawing is when an aircraft rotates in a way that causes the aircraft to point itself in a new direction. When a multirotor yaws, it simply turns in place.
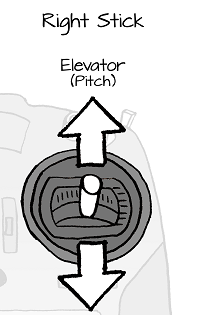
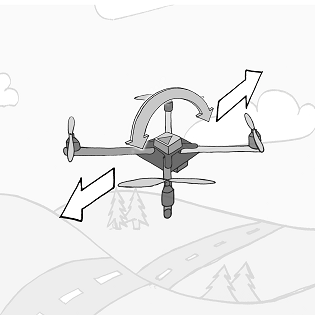
Elevator (Pitch)
The Elevator is controlled by moving the right stick vertically (up and down), and it contains a spring that returns the stick to the center when let go. Controlling the Elevator causes the multirotor to Pitch. Pitching is when an aircraft rotates in a way that causes its “nose” to move up and “tail” to move down or for its nose to move down and its tail to move up.
Pushing the right stick up will cause the multirotor to “pitch forward”. When the multirotor pitches forward, its nose drops down, its tail lifts up, and it begins to accelerate forward.
Pushing the right stick down will cause the multirotor to “pitch backward”. When the multirotor pitches back, its nose lifts up, its tail drops down, and it begins to accelerate backward.
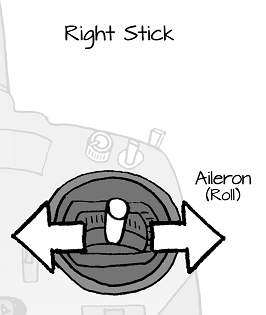
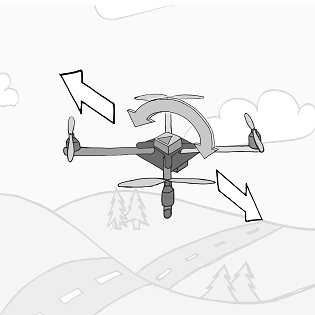
Ailerons (Roll)
The Ailerons are controlled by moving the right stick horizontally (left and right), and it contains a spring that returns the stick to the center when it is let go. Controlling the Ailerons causes the multirotor to Roll. Rolling is when an aircraft rotates in a way that causes its right side to move up and left side to move down or for right side to move down and its left side to move up.
Pushing the right stick to the right will cause the multirotor to “roll right”. When the multirotor rolls right, its right side drops down, its left side lifts up, and it begins to accelerate sideways to the right.
Pushing the right stick left will cause the multirotor to “roll left”. When the multirotor rolls left, its right side lifts up, its left side drops down, and it begins to accelerate sideways to the left.
Gear (Mode)
The ELEV-8 v3, as well as other sUAVs have various modes. These modes often determine the flight characteristics of the sUAV. For instance, there are manual modes that give full control of the sUAV to the operator and there are stability modes that fly steadily by smoothing and limiting the operator’s input. The ELEV-8 v3 currently has two flight modes, stability and manual. The ELEV-8 v3’s modes can be changed in flight, but it is best to consult with the operating instructions as it may not be safe to change modes in flight on other multirotors or sUAVs. Transmitters usually have more than one switch, and it is important to know which switch is configured as the Gear (Mode) switch. Most transmitters can be configured to used a different switch based on the operator’s preference.

Default Gear Switch on a SPEKTRUM DX6/DX7 radio configured for the ELEV-8 v3