Drop-off Detector
Up to this point in the tutorial, your cyber:bot been been programmed to look slightly upwards and take evasive maneuvers when an object is detected. The component position and code can also be modified to look downward and take evasive maneuvers when an object is not detected, such as the surface it is driving on.
This capability would allow your cyber:bot to roam on a table without driving over the edge. However, driving off a table accidentally while experimenting could certainly be harmful to your cyber:bot. So, we will take advantage of a property of infrared light. Infrared light is absorbed by most black surfaces, and reflects off of most light-colored surfaces. By making a wide black border around a white surface, we can simulate a drop-off without putting the cyber:bot in any danger of falling.
Recommended Materials for a Simulated Drop-off
(1) Roll of black vinyl electrical tape, ¾″ (19 mm) wide, or black tempera paint and brush.
(1) Sheet of white poster board, 22 x 28 in (56 x 71 cm).
Re-orient the Object Detectors
Ther are no new components or circuit changes needed for this application, just an adjustment to the position of the existing parts.
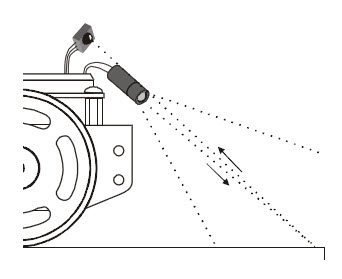
- Set the cyber:bot board’s PWR switch to position 0.
- Point your IR object detectors downward and outward as shown below.