Navigate and Avoid Obstacles
An interesting thing about these IR detectors is that their outputs are just like the whiskers. When no object is detected, the output is high; when an object is detected, the output is low. You could modify the project roaming_with_whiskers so that it works with the IR detectors with just a few changes. Here are the steps it takes:
- Go to the project roaming_with_whiskers and duplicate it or just rename it as roaming_with_IR.
- Replace the read digital blocks with ir detect blocks:
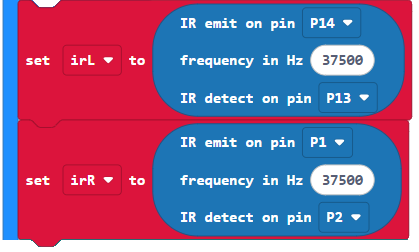
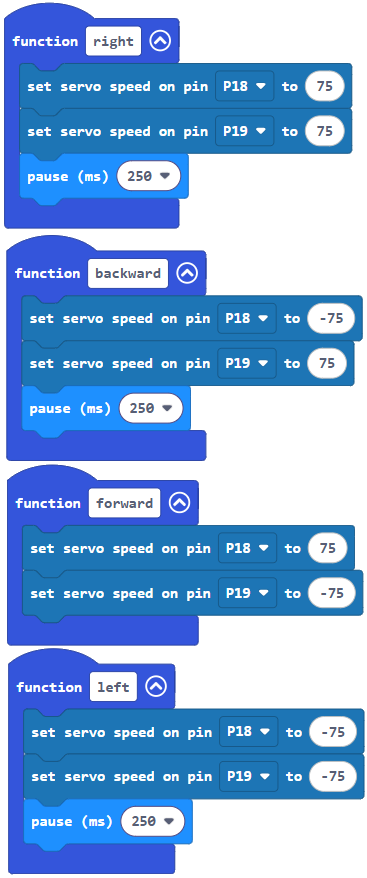
- Change all the variables in the if statement from whisker_left and whisker_right to irL and irR.

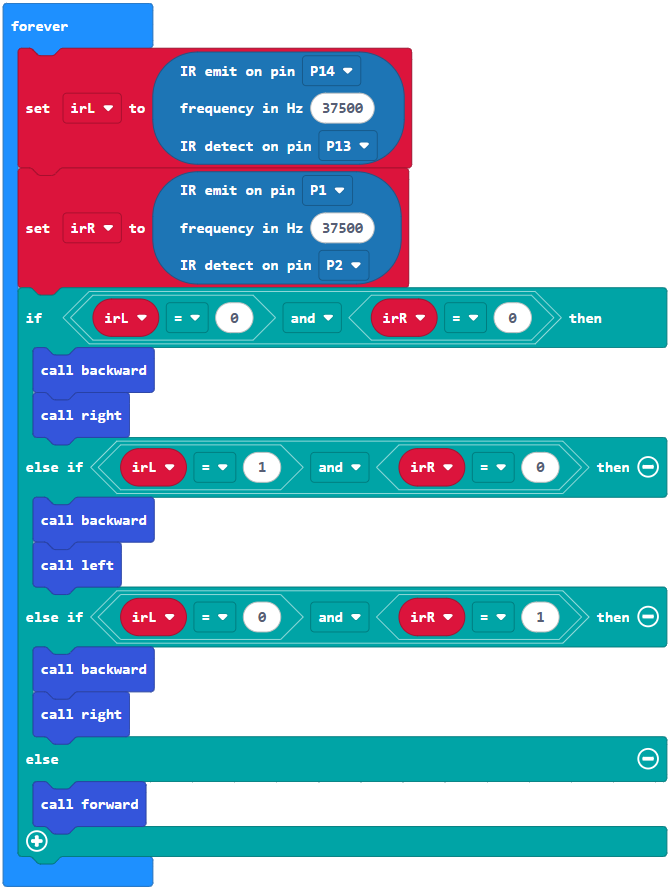
Example project: roaming_with_ir
- After modifying your project as described above, double-check that it matches roaming_with_ir below.
- Flash the project to your micro:bit module.
- Disconnect the cyber:bot from its programming cable and place it where it can roam and avoid obstacles.
- Set the power switch to position 2.
- Watch your cyber:bot roam. It should behave like roaming_with_whiskers, aside from the fact that it doesn’t actually run into objects before changing direction.