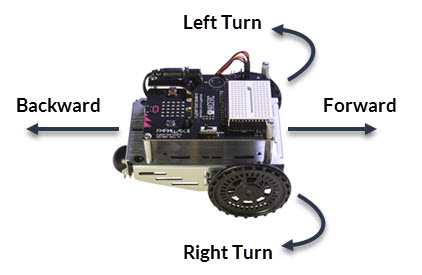
Forward, Backward, and Straightening Curves
The cyber:bot robot’s forward is in the direction of its breadboard and drive wheels. Think about the ball in the back as a “tail wheel”. One way that might help when thinking about forward, left, etc. is to imagine that you are sitting on the white breadboard facing forward while driving the cyber:bot.
- Make sure to commit the cyber:bot robot’s left, right, front and back to memory before continuing.
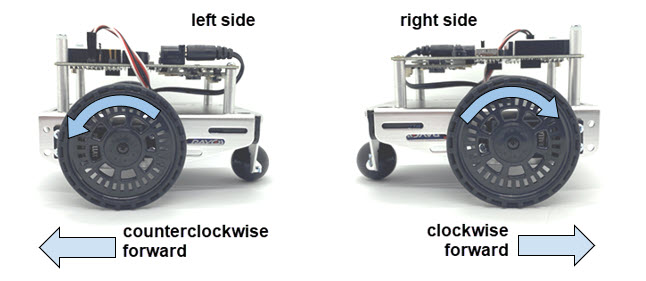
Have you ever thought about what direction a car’s wheels have to turn to propel it forward? The wheels turn opposite directions on opposite sides of the car. Likewise, to make the cyber:bot roll forward, its left wheel has to turn counterclockwise, while its right wheel turns clockwise.
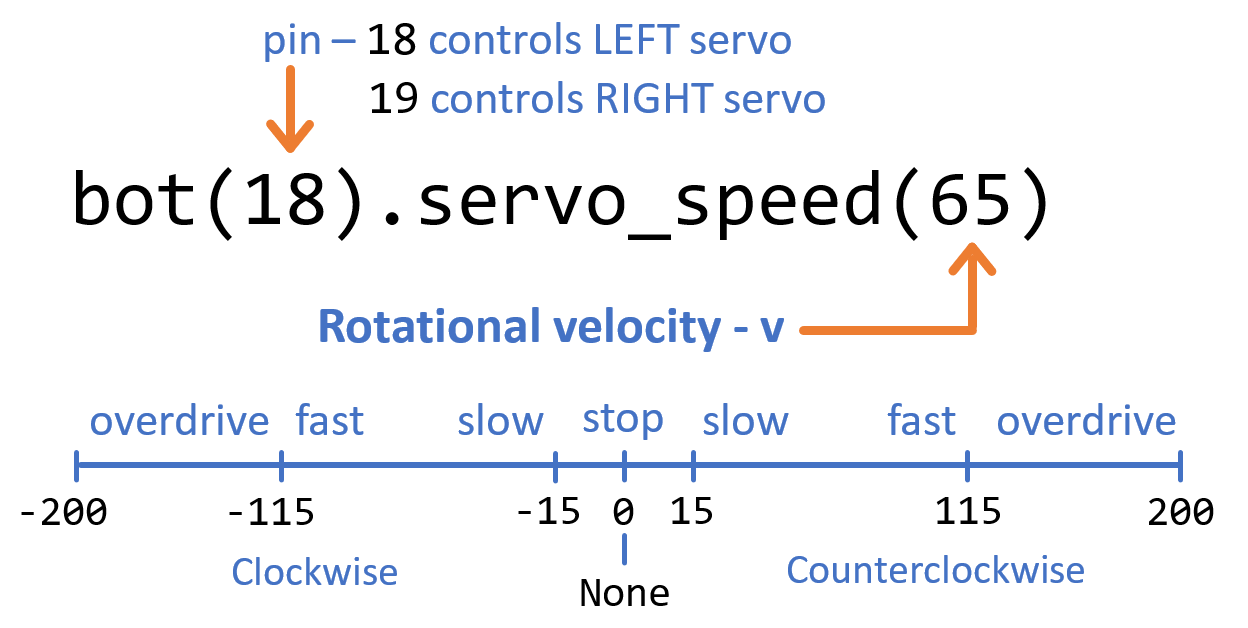
Remember that with bot(pin).servo_speed(velocity), the velocity argument can be anywhere in the -200 to 200 range.
- For turning counterclockwise, the speed control range is 15 (slow) through 115 (fast).
- For turning clockwise, the speed control range is -15 (slow) through -115 (fast).
- Values in the 115 through 200 range (and -115 through -200) are considered overdrive because it’s asking the servos to go faster than they can.
- The stop range or deadband range is -15 through + 15.
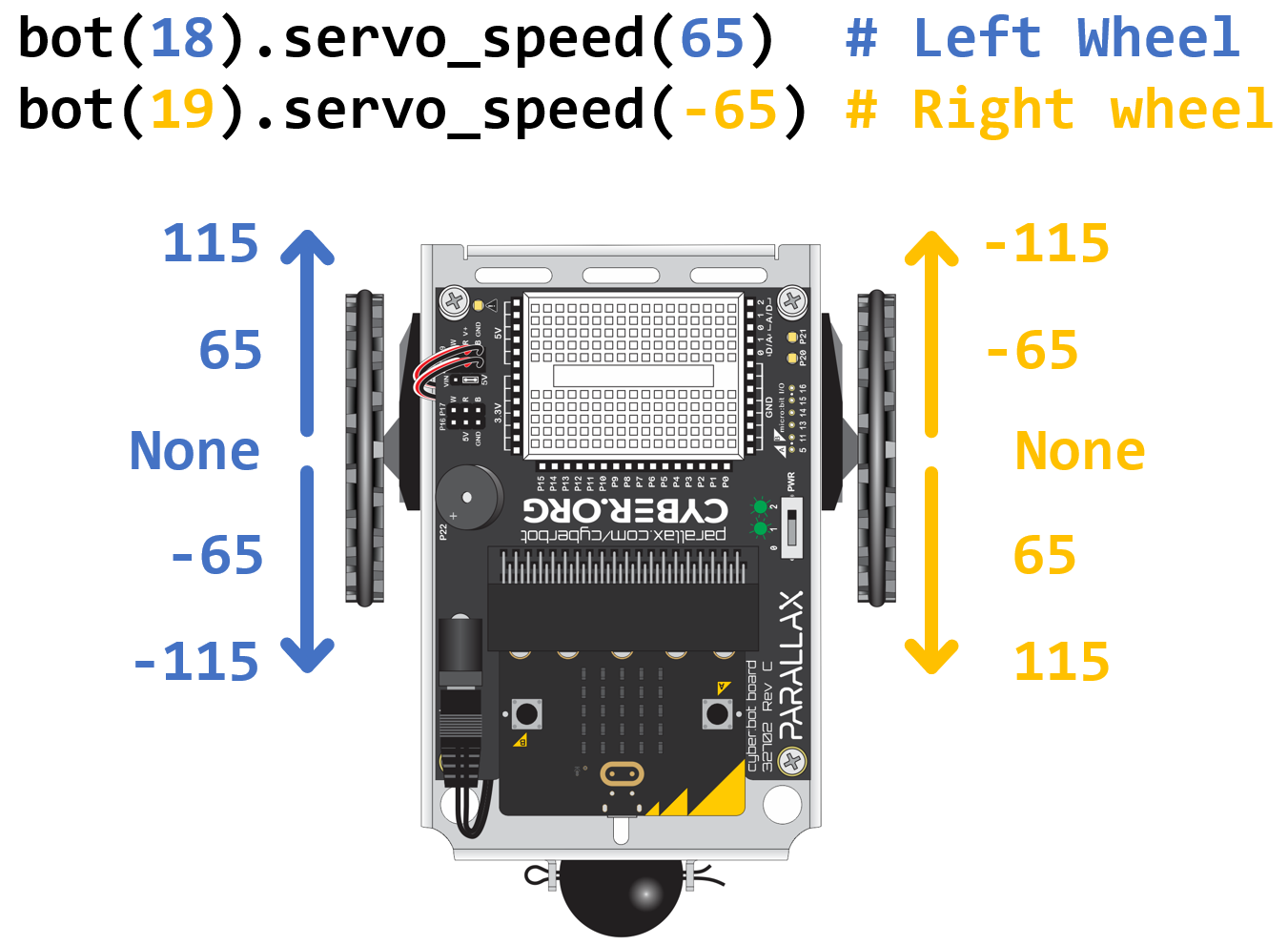
Since the wheels need to turn in the opposite direction to go forward or backward, the right wheel speed will be the opposite +/- sign of the left wheel. Use this diagram for picking wheel speeds to set the direction the cyber:bot robot goes. If you use the example of 65 for the left wheel speed and -65 for the right, the cyber:bot will roll forward at about half speed.
Don’t worry if the cyber:bot goes forward in a curve instead of perfectly straight ahead. You’ll adjust that shortly.
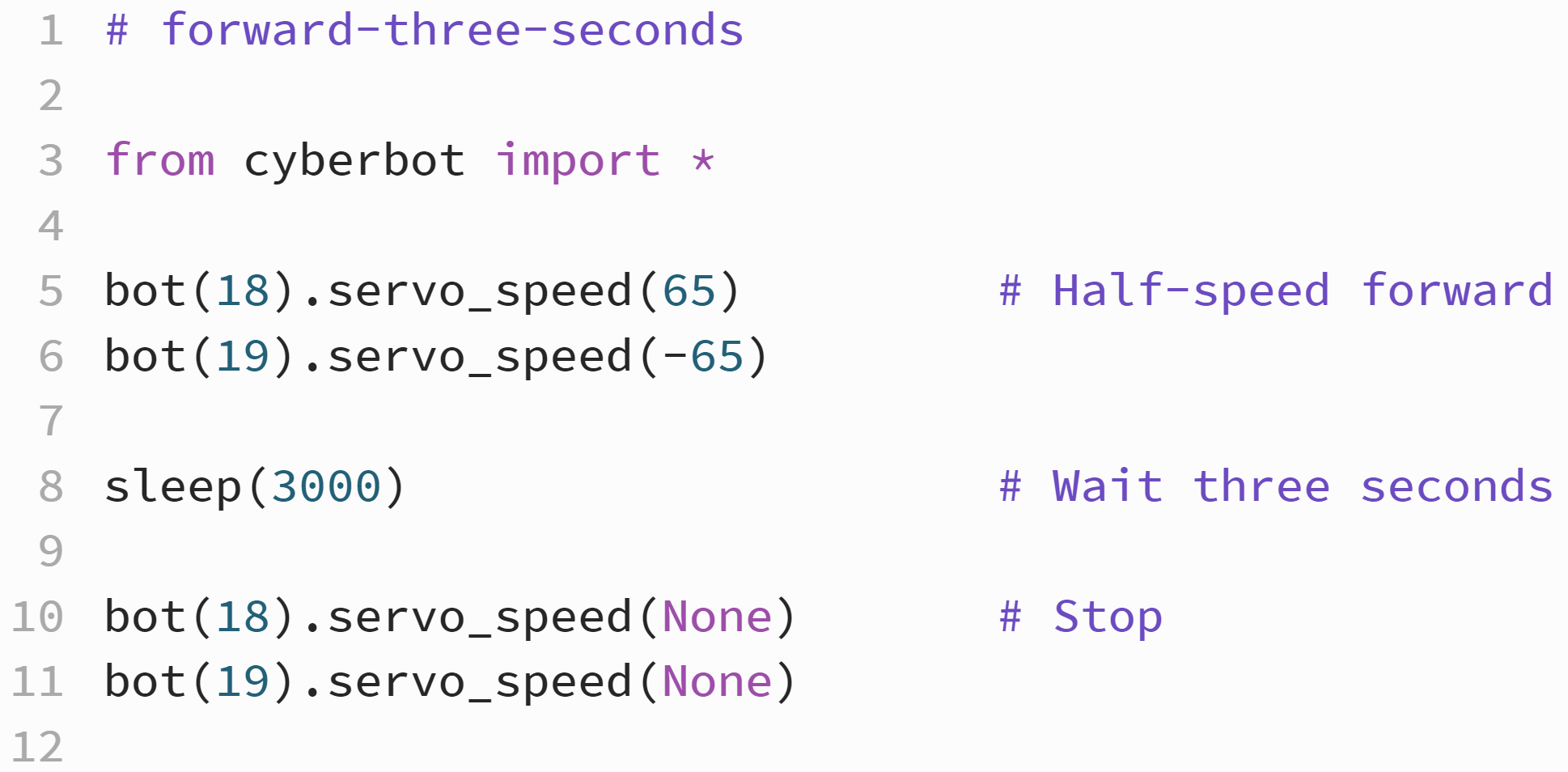
Keep in mind that a script can use the servo_speed function to control the speed and direction of each servo. Then, it can use the sleep function to keep the servos running for certain amounts of time before choosing new speeds and directions.
Script: forward-three-seconds
Here’s an example that will make the cyber:bot roll forward for about three seconds, and then stop.
- Right-click cyberbot-template-with-blink and select Save link as…
- In the micro:bit Python Editor, click Open.
- Browse to and open the cyberbot-template-with-blink.hex file you just downloaded.
- Change the script’s name to forward-three-seconds.
- Enter the script as shown below.
- Use the Save button to save the project.
Tests
- Click the Send to micro:bit button to flash the script into the micro:bit.
- Disconnect the programing cable and put the cyber:bot on the floor.
- Move the switch to position 2 and press/release the reset button on the micro:bit. (Or, set PWR to 0, then back to 2.)
- Verify that the cyber:bot drives slowly forward for three seconds.
Again, if it’s curving instead of going straight forward, you will correct that next. - Set the PWR switch to 0 when the cyber:bot is not in use, and remember to unplug the battery pack from the cyber:bot board if you are done for the day.
Try This – Straightening the Path
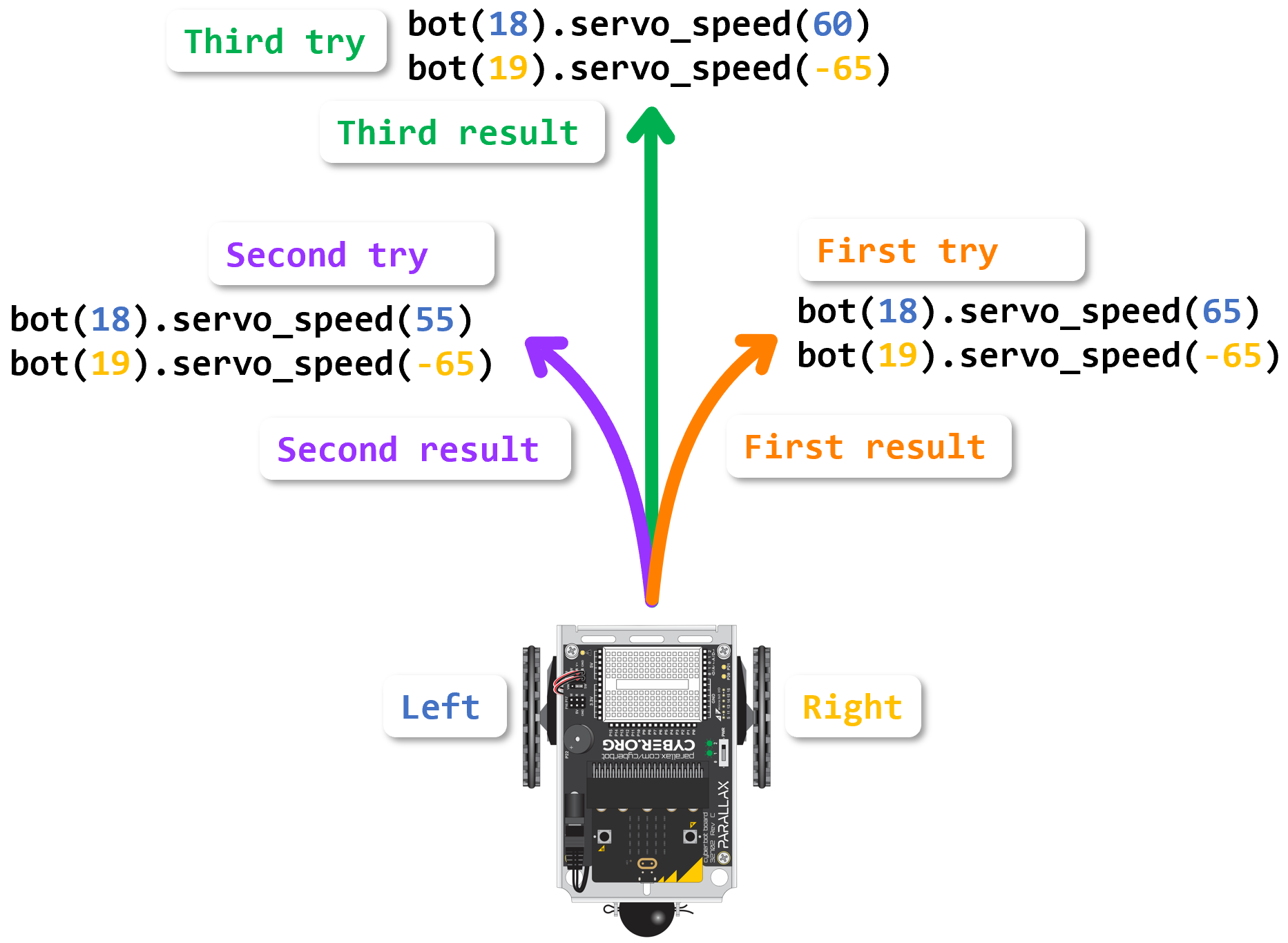
Here is an example of straightening the cyber:bot robot’s path if it’s curving when you want it to go straight. In this example, the statements to make it go forward actually causes some curving in its path.
- On the first try, the cyber:bot curved to the right. That means the left wheel was faster than the right.
- On the second try, bot(18).servo_speed(55) slowed down the left servo too much, and it curved left instead.
- On the third try, bot(18).servo_speed(60) slowed it down just the right amount for straight-forward travel.
TIPS:
- If your cyber:bot curves to the right with identical wheel speed values, slow down the left wheel with bot(18).servo_speed(slower_speed_value) -like trying 55 instead of 65.
- If your cyber:bot instead curves to the left, slow down the right wheel with bot(19).servo_speed(slower_speed_value) -like trying -55 instead of -65.
- It will take several tries to get it right.
- You may want to repeat this for top speed too, and the difference in the wheel speed values probably won’t be the same as they were at 65.
- If your cyber:bot robot goes in a curve instead of straight ahead with 65 and -65, modify the wheel speed arguments until it goes straight ahead. Your numbers are likely to be different from the ones in the diagram.
- You will have to flash the modified script (with the Send to micro:bit button) after every adjustment you make, test it and maybe try again with what you’ve learned from the way the curve changed.
Your Turn – Experiment with Speeds, Directions, and Run Times
Here is a repeat of the diagram for setting wheel speeds and how they affect your cyber:bot robot’s wheel speeds. It’s a good reference for experimenting with forward and backward speeds and turns. You can also use it as a reference for setting up turns, pivots, and curves, which we’ll take a closer look at in the next activity.
- Try servo_speed values and adjust forward paths for these speeds and list the left and right wheel speed values that straightened the forward/backward travel.
- Full speed forward:
bot(18).servo_speed(____________)
bot(19).servo_speed(____________) - Half speed forward:
bot(18).servo_speed(____________)
bot(19).servo_speed(____________) - Half speed backward:
bot(18).servo_speed(____________)
bot(19).servo_speed(____________) - Full speed backward:
bot(18).servo_speed(____________)
bot(19).servo_speed(____________)
- For a given speed, try doubling the sleep(3000) to sleep(6000).
What happened to the distance it traveled? ___________________________________. - Although the next section focuses on turns, you can probably get some interesting turns, curves, and pivots just from creative use of the numbers in the diagram.