Mount the Right Servo
Mounting the Right servo in the Chassis
Parts needed for this step:
- (4) 3/8-inch pan-head steel screws (#700-00002)
- (4) #4-40 nylon core lock-nuts (#700-00024) OR regular nuts (#700-00003)
- Servo with horn removed
- prepared chassis
- Parallax mini combo wrench (#700-10025)
- Parallax screwdriver (#700-00064)
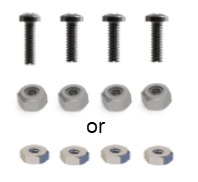
You can use regular nuts or lock-nuts to mount the servos. Lock-nuts have white Nylon inserts that make a tight grip on screws, so they don’t loosen easily with vibration. But, they take a little more force to install.

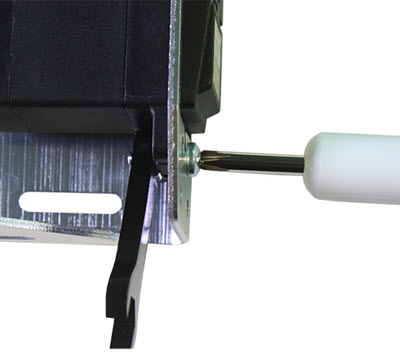
If you want to use the lock-nuts, press the closed end of the little black wrench over each lock-nut to hold it in place while attaching the screws.
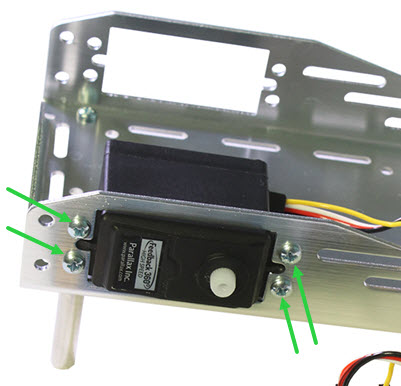
- Position the right servo inside its chassis mounting hole so the spline is towards the middle of the robot and the servo cord is next to the grommet.
- Use a 3/8 inch steel pan-head screw and nut in each of the servo’s four mounting holes to secure the servo to the chassis.