Activity 1: Build and Test the Whiskers
Remember subsystem testing? First, we’ll build the whiskers circuits and write code to check their input states before using them in navigation sketches.
Whisker Circuit and Assembly
- Gather the wisker hardware in the parts list.
- Disconnect power from your board and servos.
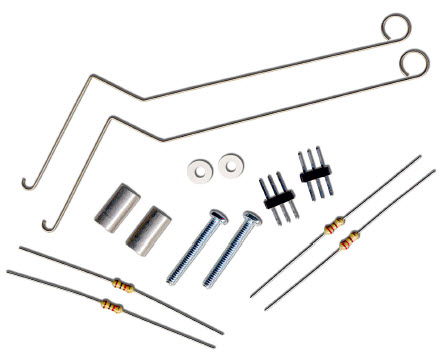
Parts List
(2) whisker wires
(2) 7/8″ pan head 4-40 Phillips screws
(2) ½″ round spacer
(2) nylon washers, size #4
(2) 3-pin m/m headers
(2) resistors, 220 Ω (red-red-brown)
(2) resistors, 10 kΩ (brown-black-orange)
(misc) jumper wires
Building the Whiskers
- Remove the LED circuits that were used as signal monitors while testing the servo navigation.
- Remove the two front screws that hold your board to the front standoffs.
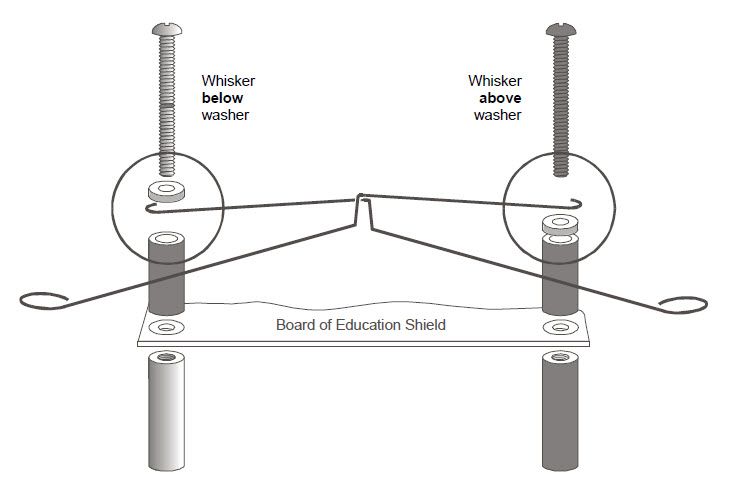
- Thread a nylon washer and then a ½″ round spacer on each of the 7/8″ screws.
- Attach the screws through the holes in your board and into the standoffs below, but do not tighten them all the way yet.
- Slip the hooked ends of the whisker wires around the screws, one above a washer and the other below a washer, positioning them so they cross over each other without touching.
- Tighten the screws into the standoffs.
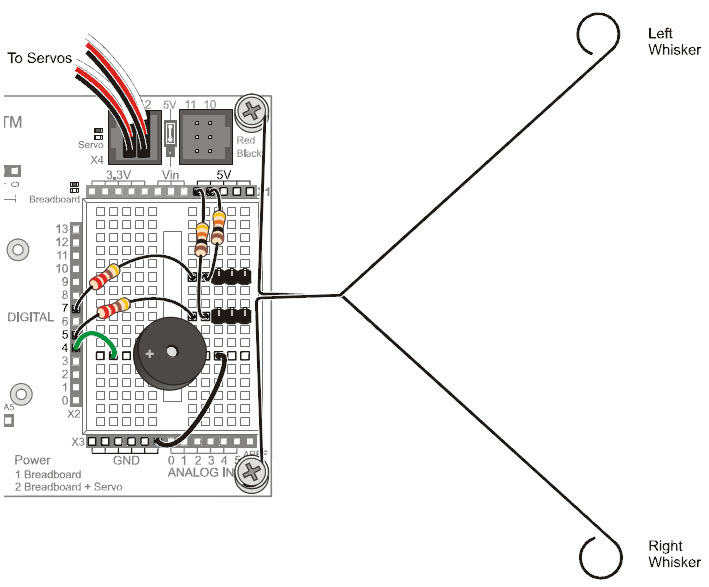
- Use the 220 Ω resistors (red‑red-brown) to connect digital pins 5 and 7 to their corresponding 3-pin headers.
- Use the 10 kΩ resistors (brown-black-orange) to connect 5 V to each 3-pin header.
- Make sure to adjust each whisker so that it is close to, but not touching, the 3-pin header on the breadboard. A distance of about 1/8″ (3 mm) is about right.