Chapter 4 Challenges
Questions
- What direction does the left wheel have to turn to make the BOE Shield-Bot go forward? What direction does the right wheel have to turn?
- When the BOE Shield-Bot pivots on one wheel to the left, what are the wheels doing? What code do you need to make the BOE Shield-Bot pivot left?
- If your BOE Shield-Bot veers slightly to one side when you are running a sketch to make it go straight ahead, how do you correct this? What command needs to be adjusted and what kind of adjustment should you make?
- If your BOE Shield-Bot travels 11 in/s, how many milliseconds will it take to make it travel 36 inches?
- Why does a for loop that ramps servo speed need delay(20) in it?
- What kind of variable is great for storing multiple values in lists?
- What kind of loops can you use for retrieving values from lists?
- What statement can you use to select a particular variable and evaluate it on a case-by-case basis and execute a different code block for each case?
- What condition can you append to a do-loop?
Exercises
- Write a routine that makes the BOE Shield-Bot back up at full speed for 2.5 seconds.
- Let’s say that you tested your servos and discovered that it takes 1.2 seconds to make a 180° turn with right-rotate. With this information, write routines to make the BOE Shield-Bot perform 30, 45, and 60 degree turns.
- Write a routine that makes the BOE Shield-Bot go straight forward, then ramp into and out of a pivoting turn, and then continue straight forward.
Projects
- It is time to fill in column 3 of Table 2‑2. To do this, modify the us arguments in the writeMicroseconds calls in the ForwardThreeSeconds sketch using each pair of values from column 1. Record your BOE Shield-Bot’s resultant behavior for each pair in column 3. Once completed, this table will serve as a reference guide when you design your own custom BOE Shield-Bot maneuvers.
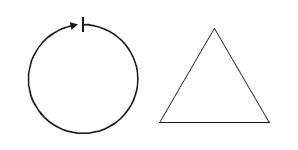
- The diagram shows two simple courses. Write a sketch that will make your BOE Shield-Bot navigate along each figure. Assume straight-line distances (the triangle’s sides and the diameter of the circle) are either 1 yard or 1 meter.