How the Phototransistor Circuit Works
A resistor “resists” the flow of current. Voltage in a circuit with a resistor can be likened to water pressure. For a given amount of electric current, more voltage (pressure) is lost across a larger resistor than a smaller resistor that has the same amount of current passing through it. If you instead keep the resistance constant and vary the current, you can measure a larger voltage (pressure drop) across the same resistor with more current, or less voltage with less current.
The micro:bit module’s analog inputs are invisible to the phototransistor circuit. So, a circuit plugged into the A/D2 socket on the cyber:bot board is monitored by the micro:bit, but the micro:bit has no affect on the circuit.
Take a look at the circuit below. With 3.3 volts (3.3 V) at the top and GND (0 V) at the bottom of the circuit, 3.3 V of electrical pressure (voltage) makes the supply of electrons in the cyber:bot’s batteries want to flow through it.
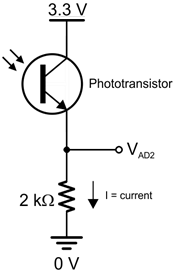
The reason the voltage at A/D2 (VAD2) changes with light is because the phototransistor lets more current pass when more light shines on it, or less current pass with less light. That current, which is labeled I in this circuit, also has to pass through the resistor. When more current passes through a resistor, the voltage across it will be higher. When less current passes, the voltage will be lower. Since one end of the resistor is tied to GND = 0 V, the voltage at the VAD2 end goes up with more current and down with less current.
If you replace the 2 kΩ resistor with a 1 kΩ resistor, VAD2 will see smaller values for the same currents. It will take twice as much current to get VAD2 to the same voltage level, which means the shadow will have to be twice as dark to reach the 0.1 V level, which is the default voltage in the script halt_under_shadow that makes the cyber:bot stop.
So, a smaller resistor in series with the phototransistor makes the circuit less sensitive to light. If you instead replace the 2 kΩ resistor with a 10 kΩ resistor, VAD2 will be 5 times larger with the same current, and it’ll only take 1/5th the light to generate 1/5th the current to get VAD2 past the 0.1 V level. So, a larger resistor makes the circuit more sensitive to light.
Connected in Series — When two or more elements are connected end-to-end, they are connected in series. The phototransistor and resistor in this circuit are connected in series.