Script and Tests
Script
- Right-click measure_volts.hex (below), and choose Save Link As…to download.
- Click the micro:bit Python Editor’s Open button, then select and open measure_volts.hex.
- Click Send to micro:bit.
- Click the three vertical dots ⋮ by the Send to micro:bit button, and select Disconnect.
- Start the CYBERscope:
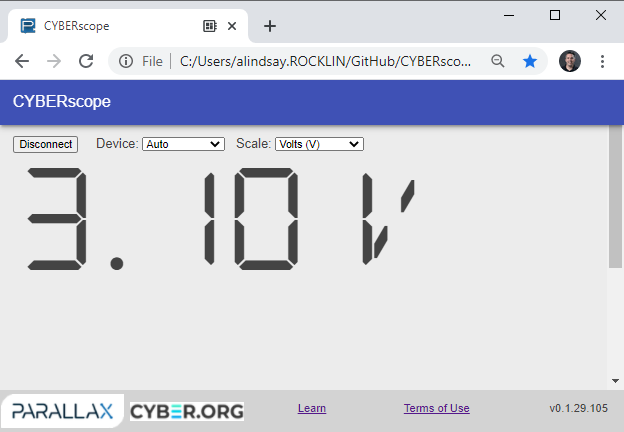
- In a different browser tab, go to cyberscope.parallax.com.
- Click the CYBERscope’s Connect button.
- In the serial port dialog, select the port with mbed in its name, and then click Connect.
Tests
When your battery holder has alkaline batteries and measures 2.8 V or less, it means the batteries have lost much of their charge. This can lead to sluggish or nonexistent servo motor motion. So, this test is important to make sure the batteries are not too low for servo control.
- Verify that the voltage is somewhere in the 2.8 to 3.2 V range.
- Make a note of the voltage you measured; you might need it later
- Remove the batteries from the pack when you are done with these tests, but be ready to put them back in. Otherwise, the micro:bit and servo will drain the batteries overnight.