Go and Get an Object with Speed Control
In this activity, you will add cyber:bot navigation techniques to make the cyber:bot robot roll to, pick up, move, and set down objects. The example scripts will control the Feedback 360° servos much like the normal continuous rotation servos, by setting speeds for certain run times. In the next activity after this one, you use the distance travel features that are only available with the Feedback 360° servos.
Parts
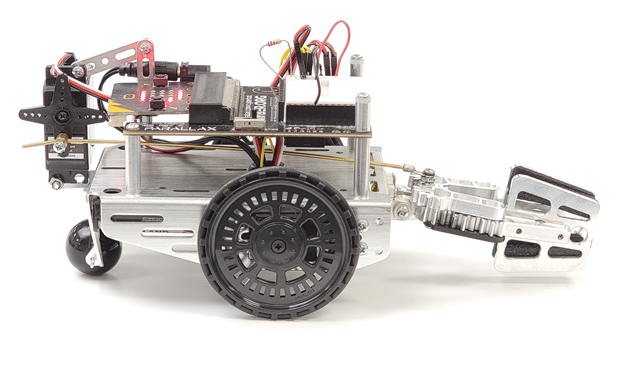
(1) cyber:bot with gripper installed, and tested and tuned by following the Parts, Circuit, Script and Tests sections in the previous activity.