Rotation, Torque and Angular Momentum
Torque and Angular Velocity
When a quadcopter tilts so that it can direct its thrust and move laterally, it does so by creating more thrust on one side of the quadcopter than the other. This difference in thrust creates a torque. A torque is a force applied some distance away from a rotating center:
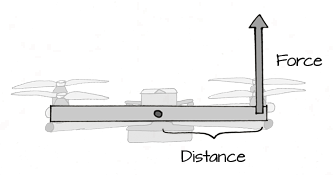
Torque is greatest when the force is applied further away from the center – this is why a long wrench helps you loosen a bolt more easily than a short wrench. To calculate torque, we use the formula:

Torques are what cause rotation. Rotation is when an object turns around its center. The faster something rotates, the more angular velocity it has. Angular velocity can be measured in degrees per second. Another common measurement is revolutions per minute, or RPM. If you remember that there are 360° in a circle, and if an object takes 2 seconds to make one complete rotation, it’s angular velocity would be 180° per second.
Angular Momentum
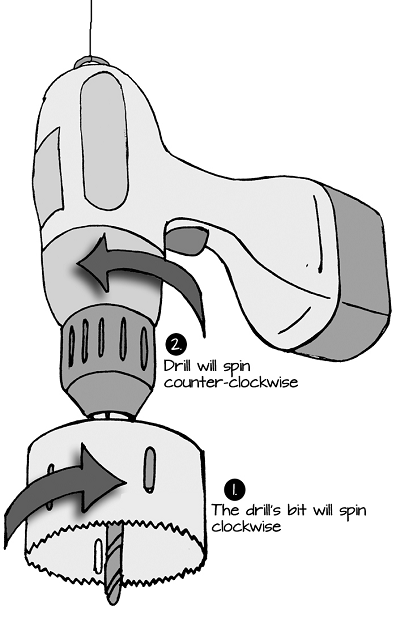
Do you remember that when an object is moving quickly it has a lot of momentum? The momentum from earlier in the chapter applied to objects moving in a straight line. What if an object is sitting still but rotating like a top? This is another kind of momentum called angular momentum. Just like momentum, the more quickly an object is rotating, the larger its angular momentum is. Momentum and angular momentum are both conserved. That means that if one part of an object starts rotating, another part of it must rotate in the opposite direction unless a force prevents it from rotating in that opposite direction. Imagine a drill hanging from a string. If the drill is activated, the bit will spin rapidly. The drill’s body will conserve angular momentum by rotating in the opposite direction:
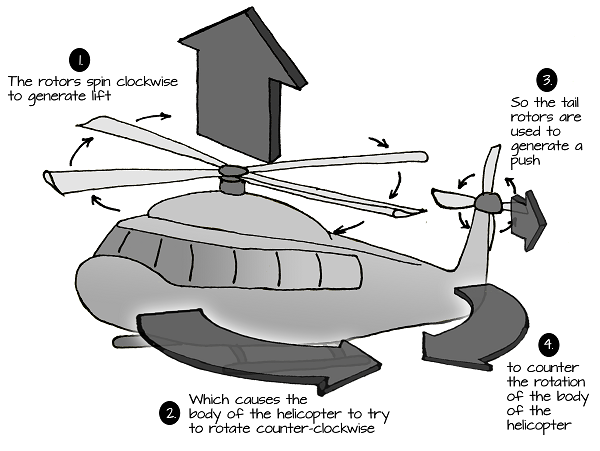
Helicopters experience this as well. By using a tail rotor, helicopters are able to prevent their bodies from spinning out of control:
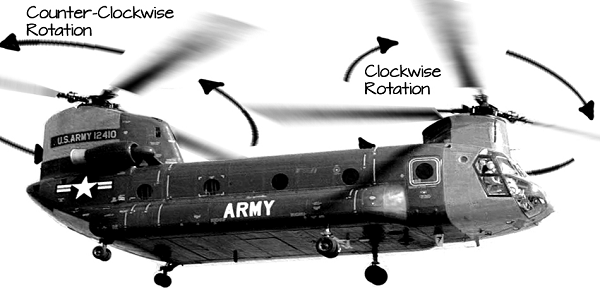
Some larger helicopters (like the Boeing Chinook CH47 pictured below) use two rotors that spin in opposite directions so that the angular momentum of one rotor cancels out the angular momentum of the other:
Educators: For additional resources, visit Khan Academy here or search online for “angular momentum practice problems“