How the Maneuver Tests Work
Both the cyberbot and feedback360 modules have to be added to the micro:bit file system for the script to work. In the maneuver tests you just finished, both scripts were included in the .hex file speeds_forward_left_right_backward.hex. Keep in mind that the feedback360 module is not included in .py files for the activities throughout the other cyber:bot tutorials, and would need to be added!
For a reminder on how to add ado that, see Add modules to your micro:bit. Pro tip: you can always reopen a script that had the modules added and was as a .hex file. That way, you won’t have to add modules every time. You can just open a previous app and then give it a new name before you start changing it. For a refresher on this, see Save & Edit Scripts.
How the speeds_forward_left_right_backward Script Works
Below the name comment, the script imports both the cyberbot and feedback360 modules.
# speeds_forward_left_right_backward from cyberbot import * from feedback360 import *
A call to drive.connect is required to start the Feedback 360° built into the cyber:bot board.
drive.connect()
The drive.speed(64, 64) call starts the Feedback 360° servos turning at 1 turn/second. Then, sleep(2000) makes sure the wheels continue to turn for 2 seconds.
drive.speed(64, 64) # Forward sleep(2000)
The drive.speed(-64, 64) call makes the left servo turn backwards and while the right servo continues to roll forward. The result is that the cyber:bot turn to the left by rotating in place. The sleep(1000) makes sure the wheels continue this maneuver for 2 seconds.
drive.speed(-64, 64) # Rotate left sleep(1000)
This next bit below is just the turn right version of the previous routine.
drive.speed(64, -64) # Rotate right sleep(1000)
Compare this to the first maneuver. Instead of positive values, it has negative values. The result is that both wheels reverse.
drive.speed(-64, -64) # Backward sleep(2000)
Setting the speeds to zero makes the servos stay still, bringing the cyber:bot to a stop.
drive.speed(0, 0)
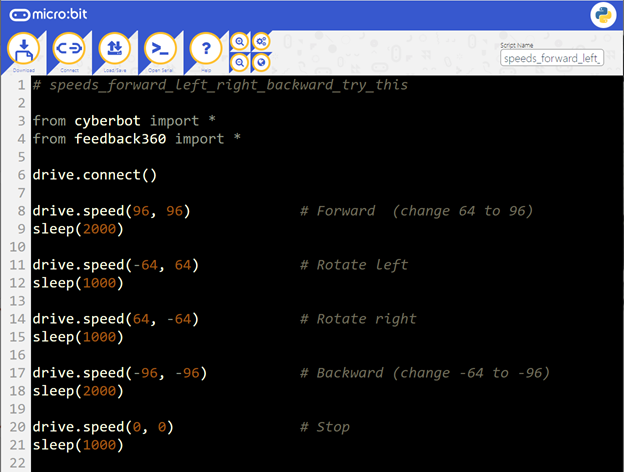
Try This: Going Faster
Try changing the forward and backward speeds to +/- 96. This should make the cyber:bot roll 1.5x faster!
- Modify the script as shown below by changing the forward and backward drive speeds.
- Change the Script Name and comment to speeds_forward_left_right_backward_try_this.
- Click Save to cownload a copy of your work.
- Reconnect your cyber:bot to USB.
- Set the PWR switch to 0
- Flash the script into the cyber:bot
- Disconnect the cyber:bot from the USB cable.
- Set it on the floor and set the PWR switch to 2.
- Verify that the forward and backward speeds increased.