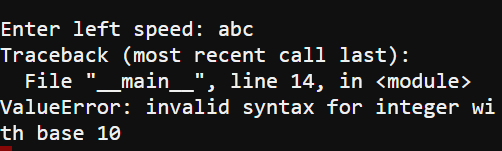
Just as we added exception handling to the tethered prototype, we need to add code that deals with unusable characters typed in for the left and right wheel speeds, and the run time in milliseconds.
What happened? Did an exception occur?
If you haven't done the the Exception Handling Primer [1] yet, you may want to read through it to understand what is going on here!
In any case, if you follow the steps in the next Your Turn section, your wireless app will be equipped to deal with such user entry errors without leaving your cyber:bot stranded.

Links
[1] https://learn.parallax.com/tutorials/robot/cyberbot/exception-handling-primer