Scribbler 3 Robot Block Reference
Light
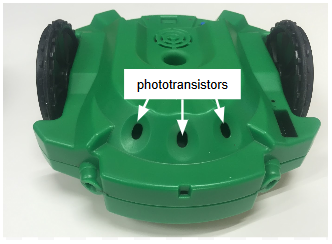
LIGHT blocks monitor the three phototransistors on the top-front of the Scribbler 3 Robot.
light sensed

The light sensed block has 2 selectable conditions. If the light sensor readings match the block conditions selected by the user, then the light sensed block provides a value of true or false.
The first condition determines whether the block returns true or false based on whether the most (brightest) or least (darkest) amount of light is detected by the individual light sensor specified by the second drop-down menu.
The second condition determines which individual light sensor (front, right, or left) is detecting the most or least amount of light.
light sensor reading

The light sensor reading block returns the current light level value, between 0 and 100, from either the left, center, or right light sensor in the top front of the Scribbler robot (whichever has been selected by the user). The value increases as the brightness of the light increases.
DEPRECATED: detect ambient light
This block has been deprecated. It will still work in programs that already contain it, but it is not available in new programs. It may also appear orange, signifying that it should be replaced as soon as possible. It was replaced to provide more flexibility by allowing both if and else conditions when combined with the if…do block.
The functionality of this block can be recreated using a handful of other blocks. Most users will be able to combine the if…do block with the current detect line block:

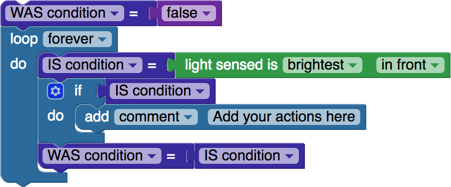
For users who needed the functionality provided by the “was” and “was not” conditions, you can set up two variables to track the current and past values of the line sensor:
The second condition determines what the light sensor readings should be, with the following options:
- in front: consider a detection successful if the center light sensor receives significantly more light than the other light sensors
- to the left: consider a detection successful if the left light sensor receives significantly more light than the other light sensors
- to the right: consider a detection successful if the right light sensor receives significantly more light than the other light sensors
- on all sides: consider a detection successful if the all light sensors receive light, and the amount is similar.