Navigate by Touch
Detect Obstacles by Bumping into Them Whisker sensors allow your ActivityBot 360° to detect obstacles by bumping into them. When … Read more
Detect Obstacles by Bumping into Them Whisker sensors allow your ActivityBot 360° to detect obstacles by bumping into them. When … Read more
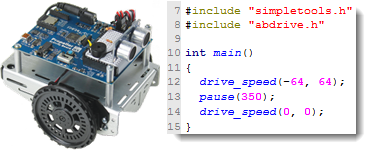 Get ready to build your robotics skills with this Propeller C Tutorial for the zippy ActivityBot. Learn how to make your robot navigate using a variety of sensors, using touch, ultrasound, visible light, and more!
Get ready to build your robotics skills with this Propeller C Tutorial for the zippy ActivityBot. Learn how to make your robot navigate using a variety of sensors, using touch, ultrasound, visible light, and more!
Course Content (https://learn.parallax.com/node/1653) This is the hands-on activity list for the ActivityBot with BlocklyProp Educator Course. The course provides initial … Read more
Get ready to build your robotics skills with this Propeller C Tutorial for the zippy ActivityBot. Learn how to make your robot navigate using a variety of sensors, using touch, ultrasound, visible light, and more!
Detect Obstacles by Bumping into Them Whisker sensors allow your robot to detect obstacles by bumping into them. When the … Read more

In this activity, you will build the PING))) sensor circuit and use it to measure distances of a variety of … Read more
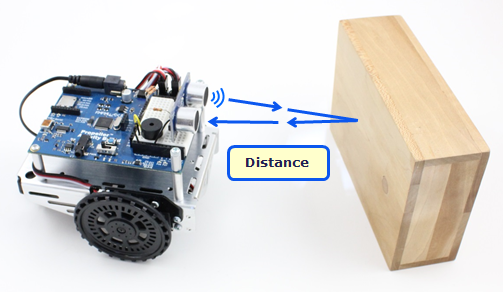
Now that you can measure centimeter distances with the PING))) sensor, and know which kinds of objects it can sense, … Read more
In this activity, we will measure the distance to a variety of objects to get familiar with what the PING))) … Read more
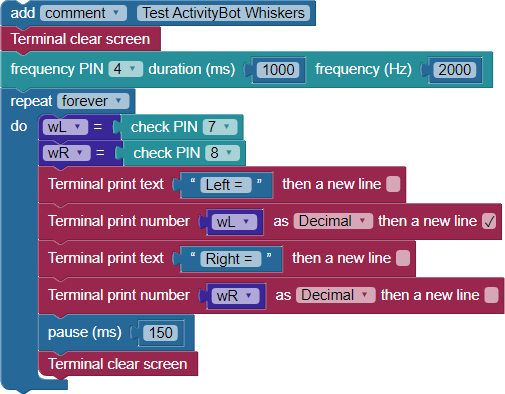
It is essential to test the whisker switches before programming your robot to navigate with them. That way, you can … Read more

Parts List (2) Whisker wires (2) 3-pin headers (2) 10 kΩ resistors (brown-black-orange) (2) 220 Ω resistors (red-red-brown) Adding the … Read more